,無(wú)線(xiàn)傳感網(wǎng)絡(luò)與遠(yuǎn)程數(shù)據(jù)通信技術(shù),實(shí)現(xiàn)了建筑塔機(jī)單機(jī)運(yùn)行防碰撞
、群塔作業(yè)多機(jī)防碰撞的實(shí)時(shí)安全監(jiān)控與聲光預(yù)警報(bào)警等功能,能夠?qū)崟r(shí)動(dòng)態(tài)的遠(yuǎn)程監(jiān)控
、遠(yuǎn)程報(bào)警和遠(yuǎn)程告知,使得塔機(jī)安全監(jiān)控成為開(kāi)放的實(shí)時(shí)動(dòng)態(tài)監(jiān)控
。產(chǎn)品從技術(shù)手段上**了對(duì)塔機(jī)使用過(guò)程中行為的及時(shí)監(jiān)看
、切實(shí)預(yù)警,能夠有效減少設(shè)備運(yùn)行過(guò)程中的危險(xiǎn)因素和安全隱患
,減少塔機(jī)安全生產(chǎn)事故的發(fā)生。

塔機(jī)安全監(jiān)控管理系統(tǒng)塔機(jī)間碰撞報(bào)警
(1)塔臂之間碰撞報(bào)警
塔機(jī)安全監(jiān)控系統(tǒng)可以在兩塔機(jī)塔臂接近時(shí)發(fā)出報(bào)警信號(hào)
,提醒司機(jī)謹(jǐn)慎操作,并在高危情況下自動(dòng)有向性斷電
。
(2)塔臂與塔身碰撞報(bào)警
塔機(jī)安全監(jiān)測(cè)儀可在低塔機(jī)塔臂接近高塔機(jī)塔身時(shí)發(fā)出報(bào)警
,提醒司機(jī)謹(jǐn)慎操作,并在高危情況下自動(dòng)有向性斷電
。
(3)塔臂與鋼絲繩碰撞報(bào)警
塔機(jī)安全監(jiān)測(cè)儀可在低塔機(jī)塔臂接近高塔機(jī)鋼絲繩時(shí)發(fā)出報(bào)警
,提醒司機(jī)謹(jǐn)慎操作
,并在高危情況下自動(dòng)有向性斷電
。
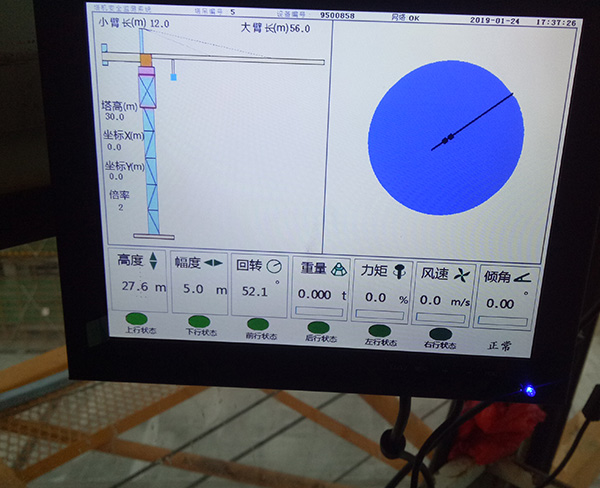
塔機(jī)安全監(jiān)控管理系統(tǒng)典型功能與應(yīng)用:
1
、多限位監(jiān)測(cè)
實(shí)時(shí)監(jiān)測(cè)力、力矩
、變幅
、高度、回轉(zhuǎn)
、大車(chē)行走等多項(xiàng)限位參數(shù),到達(dá)限位提前預(yù)警
。
2
、智能防碰撞
采用“動(dòng)態(tài)三維防碰撞”技術(shù)
,支持平臂、動(dòng)臂
、行走式等多種施工塔機(jī)需求
。
3、黑匣子記錄
系統(tǒng)實(shí)時(shí)記錄塔機(jī)的運(yùn)行狀態(tài)
,滾動(dòng)存儲(chǔ)
;監(jiān)控記錄可下載
,歷史數(shù)據(jù)可回放
。
4
、系統(tǒng)自檢
內(nèi)含智能檢測(cè)模塊,有效智能控制塔機(jī)
,達(dá)到“遠(yuǎn)程開(kāi)停機(jī)”管理目標(biāo)
。
5、駕駛員管理
通過(guò)人員識(shí)別傳感器(IC卡識(shí)別
、指紋識(shí)別
、人臉識(shí)別),加強(qiáng)特別工種操作人員身份識(shí)別
。
6、系統(tǒng)遠(yuǎn)程升級(jí)
支持在線(xiàn)監(jiān)控系統(tǒng)“遠(yuǎn)程智能升級(jí)模式”
。
7
、創(chuàng)新外設(shè)
支持離線(xiàn)檢測(cè)
、起落鉤報(bào)警器
、小車(chē)激光定位、GPS定位設(shè)備聯(lián)動(dòng)
。
我們公司以“誠(chéng)信守法
、以人為本
、求實(shí)創(chuàng)新
、勤勉進(jìn)取、合作共贏”為理念
,以“長(zhǎng)遠(yuǎn)發(fā)展
、永續(xù)經(jīng)營(yíng)、奉獻(xiàn)社會(huì)、共創(chuàng)未來(lái)”為愿景
,以“保質(zhì)保量
、盡職盡責(zé)、全心全意”為宗旨
,堅(jiān)持以市場(chǎng)為導(dǎo)向