,包括塔機(jī)的運(yùn)行狀態(tài)、操作員的操作記錄等
。這些數(shù)據(jù)可以幫助事故調(diào)查人員重建事故現(xiàn)場
,分析事故原因。
3. 故障診斷:塔機(jī)黑匣子可以記錄塔機(jī)的故障信息,包括傳感器的異常
、電氣系統(tǒng)的故障等
。這些數(shù)據(jù)可以幫助維修人員進(jìn)行故障診斷,提高塔機(jī)的維修效率
。
4. 遠(yuǎn)程監(jiān)控:通過與塔機(jī)黑匣子連接的互聯(lián)網(wǎng)或無線網(wǎng)絡(luò)
,可以實(shí)現(xiàn)對(duì)塔機(jī)的遠(yuǎn)程監(jiān)控
。監(jiān)控人員可以通過查看黑匣子中的數(shù)據(jù)
,了解塔機(jī)的工作狀態(tài)
,及時(shí)發(fā)現(xiàn)并解決潛在問題。
總之
,塔機(jī)黑匣子的功能主要包括數(shù)據(jù)記錄
、事故重建、故障診斷和遠(yuǎn)程監(jiān)控等
,可以提高塔機(jī)的工作效率和安全性。

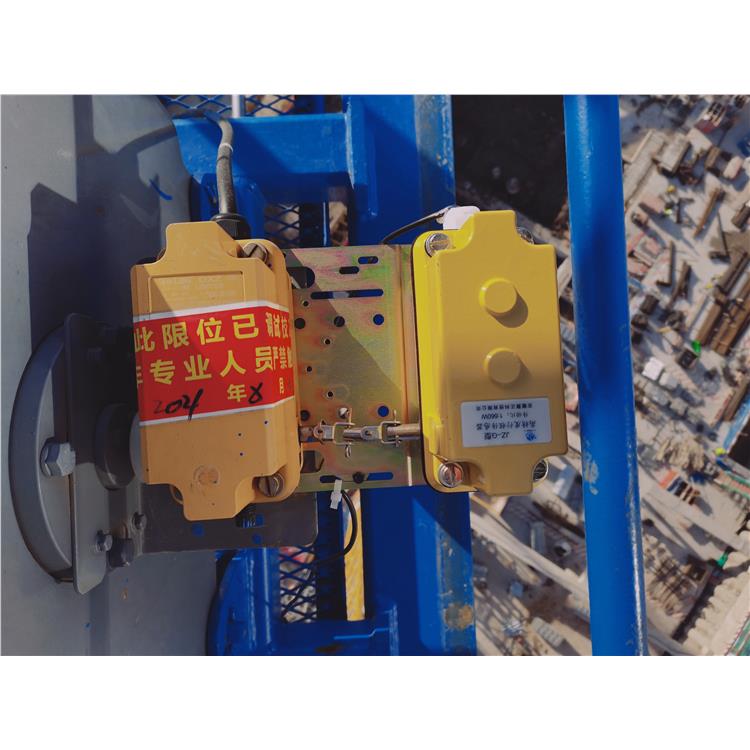
塔吊黑匣子防碰撞系統(tǒng)的特點(diǎn)包括:
1. 實(shí)時(shí)監(jiān)測:系統(tǒng)能夠?qū)崟r(shí)監(jiān)測塔吊的運(yùn)動(dòng)狀態(tài)和周圍環(huán)境
,包括其他塔吊
、建筑物、障礙物等
。
2. 高精度定位:系統(tǒng)采用高精度的定位技術(shù)
,能夠準(zhǔn)確計(jì)算塔吊的位置和姿態(tài)。
3. 智能分析:系統(tǒng)能夠智能分析塔吊的運(yùn)動(dòng)軌跡和周圍環(huán)境的變化
,根據(jù)預(yù)設(shè)的規(guī)則進(jìn)行判斷和預(yù)警。
4. 實(shí)時(shí)警報(bào):系統(tǒng)能夠及時(shí)發(fā)出警報(bào)
,提醒操作人員注意可能的碰撞風(fēng)險(xiǎn)
,并采取相應(yīng)的措施避免事故發(fā)生。
5. 多層保護(hù):系統(tǒng)采用多層次的保護(hù)措施
,包括聲光報(bào)警
、自動(dòng)停機(jī)等,確保安全性能
。
6. 數(shù)據(jù)記錄:系統(tǒng)能夠記錄塔吊的運(yùn)行數(shù)據(jù)和碰撞事件,為事故調(diào)查和責(zé)任追究提供依據(jù)
。
7. 擴(kuò)展性:系統(tǒng)可以與其他設(shè)備和系統(tǒng)進(jìn)行聯(lián)動(dòng)
,實(shí)現(xiàn)更別的安全保護(hù)。
總體來說
,塔吊黑匣子防碰撞系統(tǒng)具有實(shí)時(shí)監(jiān)測
、高精度定位、智能分析
、實(shí)時(shí)警報(bào)、多層保護(hù)
、數(shù)據(jù)記錄和擴(kuò)展性等特點(diǎn)
,能夠提高塔吊的安全性能
,減少碰撞事故的發(fā)生。
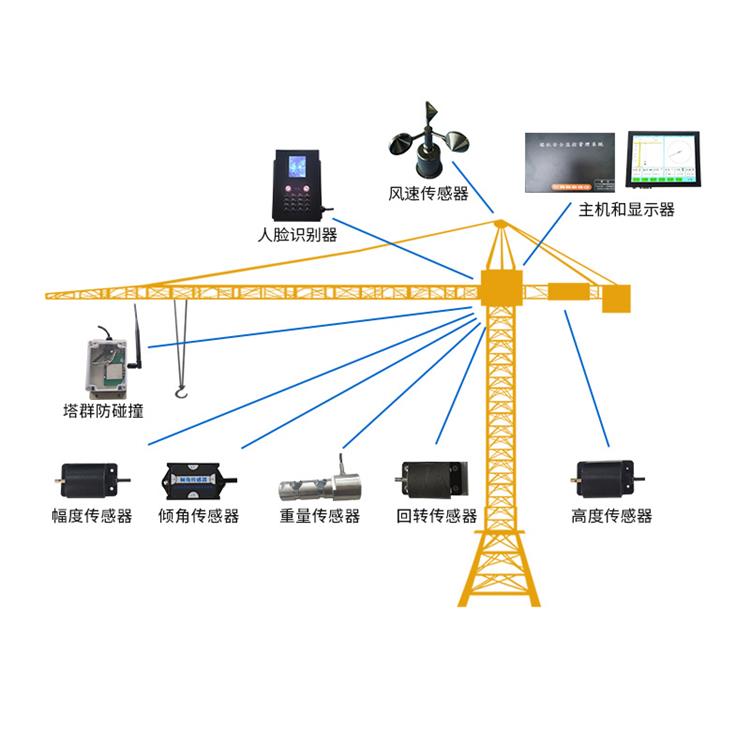
塔吊黑匣子防碰撞系統(tǒng)的功能包括以下幾個(gè)方面:
1. 碰撞預(yù)警:系統(tǒng)通過激光
、紅外線、超聲波等傳感器監(jiān)測周圍環(huán)境
,實(shí)時(shí)探測周圍的障礙物
,當(dāng)障礙物靠近塔吊工作范圍時(shí),系統(tǒng)會(huì)發(fā)出預(yù)警信號(hào)
,提醒操作人員及時(shí)采取避讓措施
。
2. 自動(dòng)停機(jī):當(dāng)系統(tǒng)檢測到障礙物接近塔吊的工作范圍時(shí),會(huì)自動(dòng)觸發(fā)停機(jī)機(jī)制
,停止塔吊的運(yùn)行,避免與障礙物發(fā)生碰撞
。
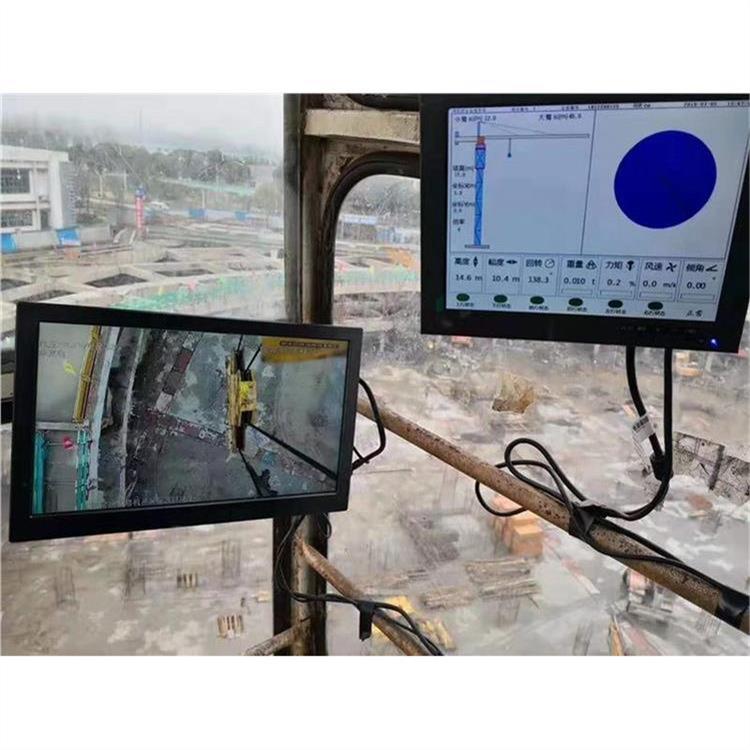
3. 實(shí)時(shí)監(jiān)控:系統(tǒng)可以實(shí)時(shí)監(jiān)控塔吊的工作狀態(tài)和周圍環(huán)境
,包括塔吊的高度、角度
、轉(zhuǎn)速等參數(shù)
,同時(shí)還可以實(shí)時(shí)顯示周圍的障礙物位置和距離,提供給操作人員參考
,幫助其做出正確的操作決策
。
4. 數(shù)據(jù)記錄和分析:系統(tǒng)可以記錄塔吊的工作數(shù)據(jù)和碰撞預(yù)警數(shù)據(jù),包括塔吊的工作時(shí)間
、工作范圍內(nèi)的障礙物數(shù)量和距離等
,這些數(shù)據(jù)可以用于事故分析和安全管理,幫助提高工作效率和安全性
。
5. 遠(yuǎn)程監(jiān)控和控制:系統(tǒng)可以通過網(wǎng)絡(luò)連接
,實(shí)現(xiàn)對(duì)塔吊的遠(yuǎn)程監(jiān)控和控制
,操作人員可以通過電腦或手機(jī)等設(shè)備,隨時(shí)隨地監(jiān)控塔吊的工作狀態(tài)和周圍環(huán)境
,并進(jìn)行遠(yuǎn)程控制
,提高操作的便利性和安全性。
總的來說
,塔吊黑匣子防碰撞系統(tǒng)主要通過預(yù)警、停機(jī)
、監(jiān)控和數(shù)據(jù)記錄等功能
,幫助操作人員及時(shí)發(fā)現(xiàn)和避免與周圍障礙物的碰撞,提高塔吊的工作安全性和效率
。
塔吊防碰撞系統(tǒng)的特點(diǎn)主要包括以下幾個(gè)方面:
1. 實(shí)時(shí)監(jiān)測:塔吊防碰撞系統(tǒng)能夠?qū)崟r(shí)監(jiān)測塔吊的位置
、高度、姿態(tài)等參數(shù)
,以及周圍的障礙物位置和移動(dòng)情況,保證對(duì)塔吊的全程監(jiān)控
。
2. 高精度定位:系統(tǒng)采用高精度的定位技術(shù)
,能夠準(zhǔn)確計(jì)算塔吊的位置和姿態(tài),確保監(jiān)測的準(zhǔn)確性和可靠性
。
3. 智能分析:系統(tǒng)能夠?qū)ΡO(jiān)測到的數(shù)據(jù)進(jìn)行智能分析
,判斷塔吊與障礙物之間的距離和相對(duì)位置,以及是否存在碰撞風(fēng)險(xiǎn)
,并及時(shí)發(fā)出警報(bào)
。
4. 報(bào)警:系統(tǒng)設(shè)有報(bào)警機(jī)制
,當(dāng)檢測到碰撞風(fēng)險(xiǎn)時(shí)
,會(huì)通過聲音、光線
、振動(dòng)等多種方式發(fā)出警報(bào)
,提醒操作人員采取相應(yīng)的措施。
5. 數(shù)據(jù)記錄與分析:系統(tǒng)能夠記錄和存儲(chǔ)塔吊的監(jiān)測數(shù)據(jù)
,包括位置
、高度
、姿態(tài)等信息
,以便后續(xù)的數(shù)據(jù)分析和統(tǒng)計(jì),為工程管理提供參考依據(jù)
。
6. 靈活可調(diào):系統(tǒng)具有一定的靈活性和可調(diào)性
,可以根據(jù)具體的施工場景和需求進(jìn)行調(diào)整和配置,以滿足不同工程的要求
。
7. 可擴(kuò)展性:系統(tǒng)具有一定的擴(kuò)展性
,可以與其他設(shè)備和系統(tǒng)進(jìn)行集成,如塔吊遠(yuǎn)程監(jiān)控系統(tǒng)
、人員定位系統(tǒng)等,實(shí)現(xiàn)更全面的工程管理和安全監(jiān)控。
總的來說
,塔吊防碰撞系統(tǒng)通過實(shí)時(shí)監(jiān)測
、高精度定位、智能分析等技術(shù)手段
,能夠有效預(yù)防塔吊與障礙物的碰撞
,提高工程施工的安全性和效率。

塔機(jī)黑匣子是一種用于記錄和存儲(chǔ)塔機(jī)工作狀態(tài)和數(shù)據(jù)的設(shè)備
,適用于以下場景:
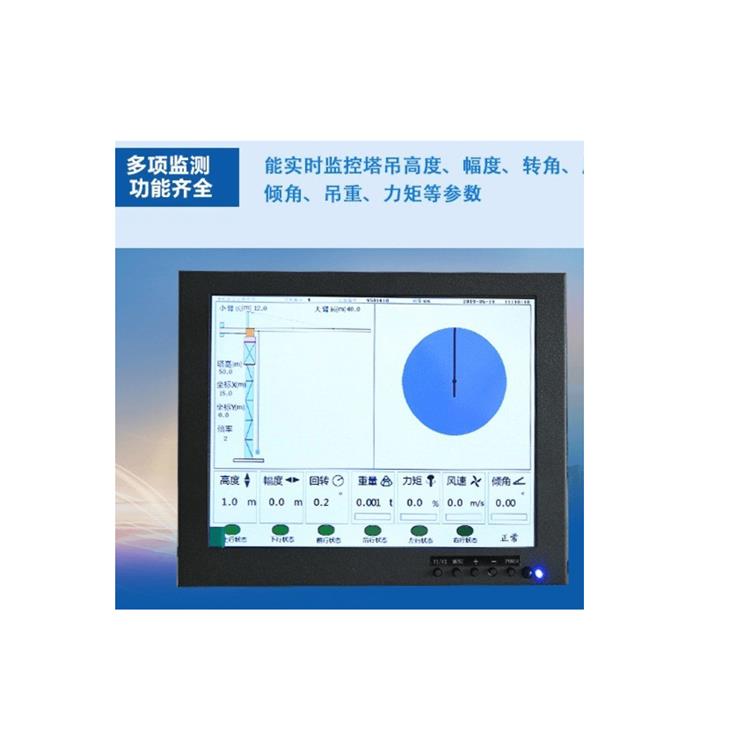
1. 塔機(jī)安全監(jiān)控:塔機(jī)黑匣子可以記錄塔機(jī)的工作狀態(tài)、起重量
、高度
、傾斜角度等數(shù)據(jù),用于監(jiān)控和評(píng)估塔機(jī)的安全性能
,及時(shí)發(fā)現(xiàn)和排除潛在的安全隱患
。
2. 事故調(diào)查與分析:當(dāng)發(fā)生塔機(jī)事故時(shí),黑匣子可以提供關(guān)鍵的數(shù)據(jù)記錄
,幫助調(diào)查人員還原事故現(xiàn)場
,分析事故原因
,為事故的處理和責(zé)任追究提供依據(jù)
。
3. 遠(yuǎn)程監(jiān)控與管理:通過黑匣子記錄的數(shù)據(jù),可以遠(yuǎn)程監(jiān)控和管理塔機(jī)的工作狀態(tài)和性能
,及時(shí)發(fā)現(xiàn)問題并進(jìn)行維修和調(diào)整
,提高工作效率和安全性。
4. 塔機(jī)性能評(píng)估與優(yōu)化:通過分析黑匣子記錄的數(shù)據(jù)
,可以評(píng)估塔機(jī)的工作性能
,找出不足之處并進(jìn)行優(yōu)化,提高塔機(jī)的工作效率和安全性
。
總之,塔機(jī)黑匣子適用于需要監(jiān)控
、記錄和分析塔機(jī)工作狀態(tài)和數(shù)據(jù)的場景
,可以提供安全監(jiān)控、事故調(diào)查












黑匣子監(jiān)控 歡迎咨詢")
黑匣子 多種型號(hào)")
黑匣子圖片 精度高")
黑匣子 穩(wěn)定可靠")
時(shí)監(jiān)測升降機(jī)")
安全監(jiān)測系統(tǒng)")
監(jiān)控管理系統(tǒng)")
系統(tǒng) 性能穩(wěn)定")
塵監(jiān)測系統(tǒng)調(diào)試 詳情請(qǐng)咨詢")
塵監(jiān)測系統(tǒng)生產(chǎn)廠家")
P塵在線監(jiān)測系統(tǒng) 符合標(biāo)準(zhǔn)")
塵在線監(jiān)測系統(tǒng) 價(jià)格合理")
價(jià)格")
 監(jiān)控一站式")