- 資質(zhì)認(rèn)證
-
- 安徽賽芙智能科技有限公司
-
全國服務(wù)咨詢熱線:
15655133111


- 產(chǎn)品分類 Product



- 價格:¥2880.00 元/臺 起
- 產(chǎn)品數(shù)量:1000000.00臺
- 發(fā)貨地址:安徽省合肥市瑤海區(qū)
- 關(guān)鍵詞:合肥碰撞塔機黑匣子安裝
- 發(fā)布日期:2025-09-16
- 閱 讀 量:412
- 銷售電話:15655133111
- 在線QQ:

安徽賽芙智能科技有限公司是一家主營智慧化工地解決方案的企業(yè) ,主營產(chǎn)品有:塔機安全監(jiān)測系統(tǒng)、塔吊黑匣子 、吊鉤可視化、吊鉤可視化系統(tǒng) 、塔機安全監(jiān)控系統(tǒng) 、塔機黑匣子等 。創(chuàng)建至今始終關(guān)注用戶需求 ,為用戶提供有的產(chǎn)品和服務(wù)。
當(dāng)前位置:首頁
> 供應(yīng)商機
> 塔機黑匣子 > 合肥碰撞塔機黑匣子安裝 多限位監(jiān)測
噴淋聯(lián)動 噴淋范圍廣 運行平穩(wěn) 噪音小
塔吊防碰撞系統(tǒng) 方便診斷塔機狀態(tài) 自動變焦智能化跟蹤
塔機防碰撞監(jiān)控系統(tǒng) 便于監(jiān)督和管理 主要應(yīng)用于塔機的實時監(jiān)控
蕪湖塔吊安全監(jiān)控系統(tǒng)廠家 外觀簡潔大方 減少盲吊引發(fā)的事故
塔吊安全監(jiān)控系統(tǒng)訂購 穩(wěn)定性高 結(jié)構(gòu)清晰穩(wěn)定
吊鉤可視化監(jiān)控系統(tǒng)型號 外觀簡潔大方 信號穩(wěn)定 抗干擾性強
宿州塔機吊鉤追蹤安全系統(tǒng)廠家 提高工作效率 結(jié)構(gòu)清晰穩(wěn)定
黃山塔機吊鉤追蹤安全系統(tǒng)價格 可遠(yuǎn)程查看 減少盲吊引發(fā)的事故
淮南吊鉤可視化系統(tǒng)訂購 外觀簡潔大方 體積小 占用空間小
蕪湖小車吊鉤可視化廠家 穩(wěn)定性高 可視吊裝 降低盲吊風(fēng)險
合肥碰撞塔機黑匣子安裝 多限位監(jiān)測
產(chǎn)品描述
別名塔吊黑匣子
適用機械塔吊
顯示器觸摸屏
類型網(wǎng)絡(luò)集成系統(tǒng)
用途工地
可否定制可以
可售賣地全國
人臉識別方式人臉、密碼
發(fā)貨方式快遞
軟件形式可提供協(xié)議
適用范圍塔吊
能否對接平臺能
名稱塔吊黑匣子
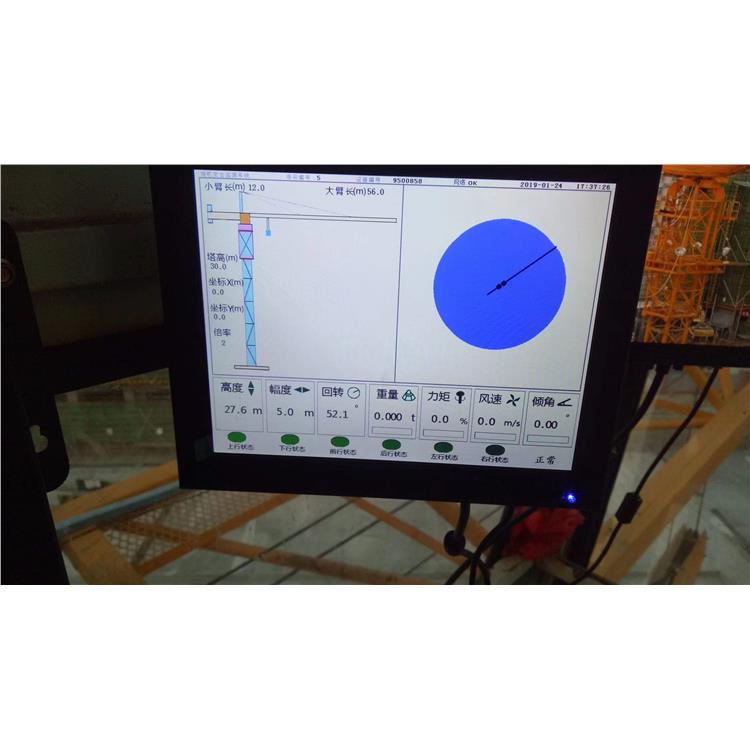
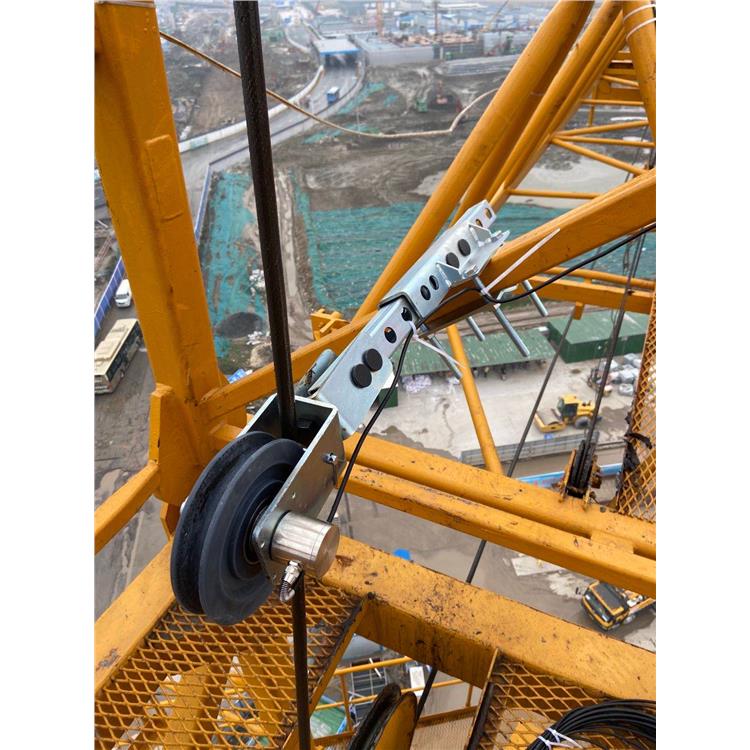
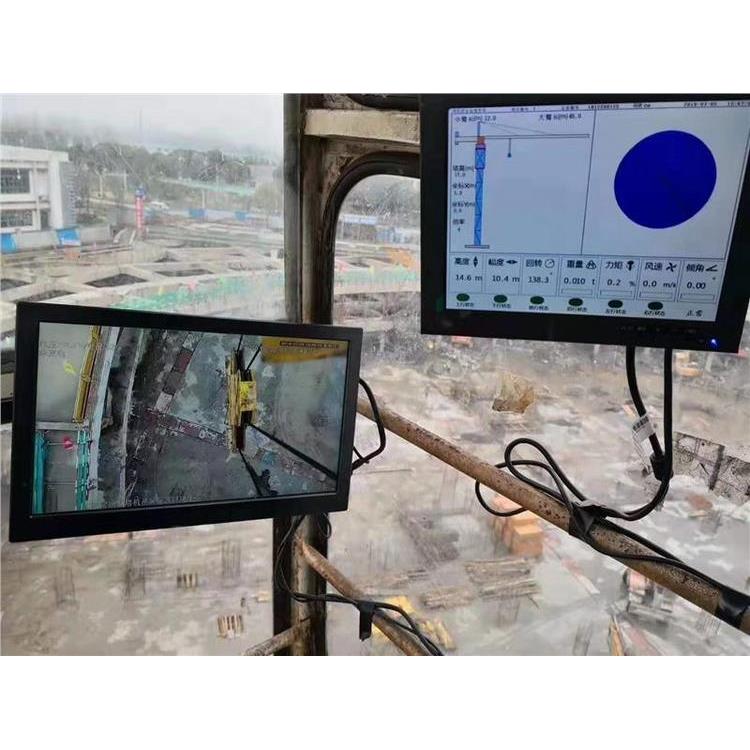
塔機黑匣子在對塔吊實現(xiàn)現(xiàn)場安全監(jiān)控的同時,通過遠(yuǎn)程高速無線數(shù)據(jù)傳輸,將塔吊運行工況安全數(shù)據(jù)和報警信息通過移動互聯(lián)網(wǎng)(2G/3G)實時發(fā)送到遠(yuǎn)程物聯(lián)網(wǎng)監(jiān)控平臺,并能在報警時自動觸發(fā)手機短信向相關(guān)人員告知,從而實現(xiàn)實時的動態(tài)遠(yuǎn)程監(jiān)控、遠(yuǎn)程報警,使得塔吊安全監(jiān)控成為開放的實時動態(tài)監(jiān)控。
黑匣子塔吊安全監(jiān)控系統(tǒng)的特點包括:
1. 實時監(jiān)控:黑匣子塔吊安全監(jiān)控系統(tǒng)能夠?qū)崟r監(jiān)控塔吊的工作狀態(tài)和運行情況,及時發(fā)現(xiàn)異常情況。
2. 多種監(jiān)控手段:系統(tǒng)采用多種監(jiān)控手段,包括視頻監(jiān)控、傳感器監(jiān)測等,可以地監(jiān)控塔吊的各個方面。
3. 數(shù)據(jù)記錄和分析:系統(tǒng)能夠記錄塔吊的工作數(shù)據(jù),并進行分析,以便對塔吊的運行情況進行評估和改進。
4. 報警功能:系統(tǒng)能夠根據(jù)事先設(shè)定的安全參數(shù),發(fā)出警報信號,提醒操作人員注意和采取相應(yīng)的措施。
5. 遠(yuǎn)程控制:系統(tǒng)支持遠(yuǎn)程控制功能,操作人員可以通過遠(yuǎn)程控制臺對塔吊進行控制和監(jiān)控,提高工作效率和安全性。
6. 系統(tǒng)集成:黑匣子塔吊安全監(jiān)控系統(tǒng)可以與其他安全設(shè)備和系統(tǒng)進行集成,實現(xiàn)全面的安全管理。
7. 數(shù)據(jù)傳輸和存儲:系統(tǒng)能夠?qū)⒈O(jiān)控數(shù)據(jù)進行傳輸和存儲,以備后續(xù)分析和查詢使用 。
8. 用戶友好性:系統(tǒng)界面簡潔明了 ,操作簡單易懂,方便用戶使用和管理。
總的來說,黑匣子塔吊安全監(jiān)控系統(tǒng)通過實時監(jiān)控、多種監(jiān)控手段、數(shù)據(jù)記錄和分析、報警功能、遠(yuǎn)程控制、系統(tǒng)集成、數(shù)據(jù)傳輸和存儲等特點,提高了塔吊的安全性和工作效率。

回轉(zhuǎn)塔機黑匣子的特點主要包括以下幾個方面:
1. 實時監(jiān)測:回轉(zhuǎn)塔機黑匣子能夠?qū)崟r監(jiān)測塔機的工作狀態(tài)和運行數(shù)據(jù),包括高度、角度、起重量等信息。
2. 數(shù)據(jù)記錄:黑匣子能夠記錄塔機的工作數(shù)據(jù),包括起重量、工作時間、起重高度等,以便后續(xù)分析和統(tǒng)計。
3. 故障診斷:黑匣子能夠監(jiān)測塔機的故障信息,并能夠提供相應(yīng)的故障診斷和報警功能,及時發(fā)現(xiàn)和解決問題。
4. 安全保護:黑匣子能夠監(jiān)測塔機的工作狀態(tài),一旦發(fā)現(xiàn)異常情況,如超載、傾斜等,能夠及時報警并采取相應(yīng)的安全保護措施,**工作安全。
5. 遠(yuǎn)程監(jiān)控:黑匣子能夠通過網(wǎng)絡(luò)連接,實現(xiàn)對塔機的遠(yuǎn)程監(jiān)控和管理,方便操作人員進行實時掌控和調(diào)度。
6. 數(shù)據(jù)分析:通過對黑匣子記錄的工作數(shù)據(jù)進行分析,可以了解塔機的工作效率、使用情況等,為后續(xù)的工作優(yōu)化和管理提供參考依據(jù)。
總的來說,回轉(zhuǎn)塔機黑匣子通過實時監(jiān)測、數(shù)據(jù)記錄、故障診斷、安全保護、遠(yuǎn)程監(jiān)控和數(shù)據(jù)分析等功能,提高了塔機的工作效率和安全性,同時也方便了管理和調(diào)度。

黑匣子塔吊安全監(jiān)控系統(tǒng)的功能包括以下幾個方面:
1. 實時監(jiān)控:系統(tǒng)能夠?qū)崟r監(jiān)控塔吊的工作狀態(tài)、位置、高度、角度等信息,以及吊鉤的負(fù)載情況,確保塔吊的正常運行。
2. 報警功能:系統(tǒng)能夠根據(jù)設(shè)定的安全參數(shù),監(jiān)測塔吊的工作狀態(tài),并在異常情況下發(fā)出警報,如超載、傾斜、高度超限等,及時提醒操作人員采取相應(yīng)的措施。
3. 數(shù)據(jù)記錄與分析:系統(tǒng)能夠記錄塔吊的工作數(shù)據(jù),并對數(shù)據(jù)進行分析,以便后續(xù)的安全評估和優(yōu)化。
4. 遠(yuǎn)程控制:系統(tǒng)能夠?qū)崿F(xiàn)對塔吊的遠(yuǎn)程控制,包括啟動、停止、轉(zhuǎn)動、升降等操作,提高操作的便捷性和安全性。
5. 視頻監(jiān)控:系統(tǒng)能夠通過攝像頭對塔吊的工作情況進行實時監(jiān)控和錄像,以便事后的回放和分析。
6. 數(shù)據(jù)傳輸與共享:系統(tǒng)能夠?qū)⒈O(jiān)控數(shù)據(jù)傳輸?shù)皆贫嘶蚱渌K端設(shè)備,實現(xiàn)數(shù)據(jù)的共享和遠(yuǎn)程訪問。
7. 統(tǒng)計報表:系統(tǒng)能夠生成塔吊的工作統(tǒng)計報表,包括工作時間、負(fù)載情況、異常事件等,方便管理人員進行監(jiān)督和決策。
總的來說,黑匣子塔吊安全監(jiān)控系統(tǒng)的功能旨在提高塔吊的安全性和工作效率,減少事故風(fēng)險,并為管理人員提供數(shù)據(jù)支持和決策參考。

小型塔吊黑匣子的特點包括:
1. 尺寸小巧:相比于傳統(tǒng)大型塔吊,小型塔吊黑匣子的尺寸更小,體積更小,更適合在狹小的工地空間中使用。
2. 輕便靈活:小型塔吊黑匣子通常采用輕質(zhì)材料制造,重量較輕,便于搬運和安裝。同時,它們也具備良好的靈活性,可以進行快速的移動和調(diào)整。
3. 節(jié)能:小型塔吊黑匣子通常采用的電動或液壓系統(tǒng),具備節(jié)能的特點。相比于傳統(tǒng)的燃油塔吊,它們更環(huán)保,更節(jié)能 。
4. 多功能性:小型塔吊黑匣子通常具備多種功能 ,可以完成吊裝、起重、搬運等多種任務(wù)。它們可以配備不同的附件和工具,以適應(yīng)不同的工地需求。
5. 智能化控制:小型塔吊黑匣子通常采用的智能控制系統(tǒng),具備自動化和遠(yuǎn)程控制的功能。操作人員可以通過電腦或移動設(shè)備對其進行監(jiān)控和控制,提高工作效率和安全性。
總的來說,小型塔吊黑匣子具備尺寸小巧、輕便靈活、節(jié)能、多功能性和智能化控制等特點,適用于狹小的工地空間,能夠提高工作效率和安全性。
傾翻塔機黑匣子是一種用于記錄和存儲塔機工作數(shù)據(jù)的設(shè)備。其主要特點包括:
1. 數(shù)據(jù)記錄功能:傾翻塔機黑匣子能夠記錄塔機的工作數(shù)據(jù),包括起重重量、起重高度、起重速度、傾角、工作時間等。
2. 數(shù)據(jù)存儲能力:黑匣子具有較大的存儲容量,能夠長時間記錄塔機的工作數(shù)據(jù),以便后續(xù)分析和查看。
3. 數(shù)據(jù)傳輸功能:黑匣子可以通過無線或有線方式將記錄的數(shù)據(jù)傳輸?shù)酵獠吭O(shè)備,如電腦、手機等,方便用戶進行數(shù)據(jù)分析和管理。
4. 防護性能:黑匣子通常具有防水 、防塵 、抗震等性能,能夠在惡劣的工作環(huán)境下正常工作 ,并保護數(shù)據(jù)的安全性 。
5. 實時監(jiān)控功能:一些的黑匣子還具備實時監(jiān)控功能,能夠?qū)λC的工作狀態(tài)進行實時監(jiān)測 ,及時發(fā)現(xiàn)異常情況并進行預(yù)警。
6. 數(shù)據(jù)分析功能:黑匣子的數(shù)據(jù)可以通過專門的軟件進行分析和處理 ,幫助用戶了解塔機的工作情況 ,提供參考和改進建議。
總的來說 ,傾翻塔機黑匣子具有數(shù)據(jù)記錄 、存儲、傳輸 、防護、監(jiān)控和分析等功能 ,能夠提高塔機的工作效率和安全性 。

塔吊防碰撞系統(tǒng)的特點主要包括以下幾個方面:
1. 實時監(jiān)測:塔吊防碰撞系統(tǒng)能夠?qū)崟r監(jiān)測塔吊的位置、高度 、姿態(tài)等參數(shù) ,以及周圍的障礙物位置和移動情況,保證對塔吊的全程監(jiān)控。
2. 高精度定位:系統(tǒng)采用高精度的定位技術(shù),能夠準(zhǔn)確計算塔吊的位置和姿態(tài),確保監(jiān)測的準(zhǔn)確性和可靠性。
3. 智能分析:系統(tǒng)能夠?qū)ΡO(jiān)測到的數(shù)據(jù)進行智能分析,判斷塔吊與障礙物之間的距離和相對位置,以及是否存在碰撞風(fēng)險,并及時發(fā)出警報。
4. 報警:系統(tǒng)設(shè)有報警機制,當(dāng)檢測到碰撞風(fēng)險時,會通過聲音、光線、振動等多種方式發(fā)出警報,提醒操作人員采取相應(yīng)的措施。
5. 數(shù)據(jù)記錄與分析:系統(tǒng)能夠記錄和存儲塔吊的監(jiān)測數(shù)據(jù),包括位置、高度、姿態(tài)等信息,以便后續(xù)的數(shù)據(jù)分析和統(tǒng)計,為工程管理提供參考依據(jù)。
6. 靈活可調(diào):系統(tǒng)具有一定的靈活性和可調(diào)性,可以根據(jù)具體的施工場景和需求進行調(diào)整和配置,以滿足不同工程的要求。
7. 可擴展性:系統(tǒng)具有一定的擴展性,可以與其他設(shè)備和系統(tǒng)進行集成 ,如塔吊遠(yuǎn)程監(jiān)控系統(tǒng)、人員定位系統(tǒng)等 ,實現(xiàn)更全面的工程管理和安全監(jiān)控 。
總的來說 ,塔吊防碰撞系統(tǒng)通過實時監(jiān)測 、高精度定位、智能分析等技術(shù)手段 ,能夠有效預(yù)防塔吊與障礙物的碰撞 ,提高工程施工的安全性和效率。

塔吊黑匣子防碰撞系統(tǒng)的特點包括:
1. 實時監(jiān)測:系統(tǒng)能夠?qū)崟r監(jiān)測塔吊的運動狀態(tài)和周圍環(huán)境,包括其他塔吊 、建筑物、障礙物等 。
2. 高精度定位:系統(tǒng)采用高精度的定位技術(shù) ,能夠準(zhǔn)確計算塔吊的位置和姿態(tài)。
3. 智能分析:系統(tǒng)能夠智能分析塔吊的運動軌跡和周圍環(huán)境的變化,根據(jù)預(yù)設(shè)的規(guī)則進行判斷和預(yù)警。
4. 實時警報:系統(tǒng)能夠及時發(fā)出警報,提醒操作人員注意可能的碰撞風(fēng)險,并采取相應(yīng)的措施避免事故發(fā)生。
5. 多層保護:系統(tǒng)采用多層次的保護措施,包括聲光報警、自動停機等,確保安全性能。
6. 數(shù)據(jù)記錄:系統(tǒng)能夠記錄塔吊的運行數(shù)據(jù)和碰撞事件,為事故調(diào)查和責(zé)任追究提供依據(jù)。
7. 擴展性:系統(tǒng)可以與其他設(shè)備和系統(tǒng)進行聯(lián)動,實現(xiàn)更別的安全保護。
總體來說,塔吊黑匣子防碰撞系統(tǒng)具有實時監(jiān)測、高精度定位、智能分析、實時警報、多層保護、數(shù)據(jù)記錄和擴展性等特點,能夠提高塔吊的安全性能,減少碰撞事故的發(fā)生。

塔吊塔機黑匣子安全監(jiān)測系統(tǒng)的功能主要包括以下幾個方面:
1. 塔吊塔機的運行狀態(tài)監(jiān)測:通過傳感器和監(jiān)測設(shè)備實時監(jiān)測塔吊塔機的各項運行參數(shù),如起重量、傾角、回轉(zhuǎn)角度、高度等,以確保塔吊塔機的正常運行。
2. 風(fēng)速監(jiān)測和預(yù)警:通過風(fēng)速傳感器監(jiān)測周圍環(huán)境的風(fēng)速,并根據(jù)預(yù)設(shè)的安全閾值進行實時預(yù)警,以避免在高風(fēng)速環(huán)境下使用塔吊塔機造成的安全隱患。
3. 傾斜度監(jiān)測和報警:通過傾斜度傳感器監(jiān)測塔吊塔機的傾斜度,并在傾斜度超過預(yù)設(shè)閾值時發(fā)出報警信號,以防止塔吊塔機因傾斜而發(fā)生傾覆事故。
4. 載荷監(jiān)測和報警:通過載荷傳感器監(jiān)測塔吊塔機的實際載荷,并與額定載荷進行比較,一旦超過額定載荷就會觸發(fā)報警系統(tǒng),以防止超載運行導(dǎo)致的塔吊塔機事故。
5. 高度監(jiān)測和預(yù)警:通過高度傳感器監(jiān)測塔吊塔機的高度,并在接近或超過安全高度限制時發(fā)出預(yù)警信號,以確保塔吊塔機操作在安全范圍內(nèi)。
6. 數(shù)據(jù)記錄和分析:系統(tǒng)可以記錄和存儲塔吊塔機的運行數(shù)據(jù),包括各項參數(shù)的變化情況和報警記錄等,以便事后分析和查找安全事故的原因。
7. 遠(yuǎn)程監(jiān)控和控制:系統(tǒng)可以通過網(wǎng)絡(luò)連接實現(xiàn)對塔吊塔機的遠(yuǎn)程監(jiān)控和控制,操作人員可以隨時隨地通過終端設(shè)備查看塔吊塔機的運行狀態(tài),并進行必要的操作和調(diào)整。
總的來說,塔吊塔機黑匣子安全監(jiān)測系統(tǒng)通過實時監(jiān)測和預(yù)警,提供了對塔吊塔機運行狀態(tài)的全面監(jiān)控,旨在提高塔吊塔機的安全性能,預(yù)防事故的發(fā)生。
回轉(zhuǎn)塔機黑匣子是一種用于監(jiān)測和記錄回轉(zhuǎn)塔機操作數(shù)據(jù)的設(shè)備,其主要功能包括:
1. 數(shù)據(jù)記錄:黑匣子能夠記錄回轉(zhuǎn)塔機的操作數(shù)據(jù),如起重量、起重高度、起重速度、回轉(zhuǎn)速度、傾斜角度等。這些數(shù)據(jù)可以用于后續(xù)的分析和報告。
2. 故障診斷:黑匣子能夠監(jiān)測回轉(zhuǎn)塔機的運行狀態(tài),一旦發(fā)現(xiàn)異?div id="4qifd00" class="flower right">;蚬收?div id="4qifd00" class="flower right">,會自動記錄相關(guān)數(shù)據(jù),以便后續(xù)進行故障診斷和修復(fù)。
3. 安全監(jiān)控:黑匣子能夠監(jiān)測回轉(zhuǎn)塔機的工作狀態(tài),如是否超載、是否超速、是否等。一旦發(fā)現(xiàn)安全風(fēng)險,會及時發(fā)出警報,以**操作人員和周圍環(huán)境的安全。
4. 遠(yuǎn)程監(jiān)控:黑匣子可以通過網(wǎng)絡(luò)連接,實現(xiàn)對回轉(zhuǎn)塔機的遠(yuǎn)程監(jiān)控和管理。操作人員可以隨時隨地查看回轉(zhuǎn)塔機的工作狀態(tài)和操作數(shù)據(jù),并進行遠(yuǎn)程控制和調(diào)整。
5. 數(shù)據(jù)分析:黑匣子記錄的操作數(shù)據(jù)可以進行數(shù)據(jù)分析,以評估回轉(zhuǎn)塔機的工作效率和性能,并提供改進建議。這有助于優(yōu)化回轉(zhuǎn)塔機的使用和維護,提高工作效率和安全性。
總的來說,回轉(zhuǎn)塔機黑匣子的功能是監(jiān)測、記錄、診斷和分析回轉(zhuǎn)塔機的操作數(shù)據(jù),以提高工作效率、安全性和管理效能。
塔吊防碰撞系統(tǒng)的功能主要包括以下幾個方面:
1. 碰撞預(yù)警:通過安裝在塔吊上的傳感器,實時監(jiān)測周圍環(huán)境,包括其他塔吊、建筑物、電線等障礙物的位置和距離。一旦檢測到潛在的碰撞風(fēng)險,系統(tǒng)會發(fā)出警報,提醒操作人員及時采取措施避免碰撞。
2. 防止交叉碰撞:當(dāng)多臺塔吊同時工作時,系統(tǒng)能夠計算各個塔吊的位置和運動軌跡,并根據(jù)這些數(shù)據(jù)進行分析,避免塔吊之間的交叉碰撞。如果系統(tǒng)檢測到塔吊之間存在潛在的碰撞風(fēng)險,會自動發(fā)出警報,并提供相應(yīng)的建議或指令。
3. 防止碰撞建筑物:塔吊防碰撞系統(tǒng)還可以監(jiān)測周圍建筑物的位置和高度,并根據(jù)塔吊的運動軌跡進行計算和分析,避免塔吊與建筑物發(fā)生碰撞。系統(tǒng)會根據(jù)實時數(shù)據(jù)提供警報和建議,幫助操作人員調(diào)整塔吊的位置和運動軌跡,確保安全施工。
4. 數(shù)據(jù)記錄和分析:系統(tǒng)能夠記錄和存儲塔吊的運行數(shù)據(jù),包括位置、運動軌跡、碰撞預(yù)警等信息。這些數(shù)據(jù)可以用于事故調(diào)查和分析,幫助改進施工流程和安全管理措施,提高施工效率和安全性。
總的來說,塔吊防碰撞系統(tǒng)通過實時監(jiān)測周圍環(huán)境和塔吊的運動狀態(tài),提供預(yù)警和建議,幫助操作人員避免碰撞事故,**施工安全。

工地塔機黑匣子適用于以下場景:
1. 塔機安全監(jiān)測:黑匣子可以記錄塔機的運行狀態(tài)、工作時間、載重情況等數(shù)據(jù),用于監(jiān)測塔機的安全運行情況。
2. 事故調(diào)查:在塔機發(fā)生事故時,黑匣子可以提供事故發(fā)生前的數(shù)據(jù)記錄,幫助調(diào)查人員分析事故原因。
3. 違規(guī)違法監(jiān)測:黑匣子可以記錄塔機操作員的行為 ,如超載、超速等違規(guī)行為 ,用于監(jiān)測和管理塔機的使用情況 。
4. 塔機維護管理:黑匣子可以記錄塔機的工作時間 、使用頻率等數(shù)據(jù) ,用于制定維護計劃和管理塔機的維護情況 。
5. 塔機性能評估:通過分析黑匣子中的數(shù)據(jù),可以評估塔機的性能和工作效率 ,為塔機的選型和使用提供參考
您是第15551246位訪客
版權(quán)所有 ©2025-09-17 皖I(lǐng)CP備2021014040號-1
安徽賽芙智能科技有限公司 保留所有權(quán)利.
技術(shù)支持:
八方資源網(wǎng)
免責(zé)聲明 管理員入口 網(wǎng)站地圖
百度首頁推廣咨詢電話:13312972391 符經(jīng)理 微信同號
手機網(wǎng)站
15655133111
地址:安徽省 合肥市 高新區(qū)玉蘭大道777號雙贏大廈10層1011-A027室
聯(lián)系人: 李經(jīng)理先生
微信帳號:
、吊鉤可視化、吊鉤可視化系統(tǒng)
、塔機安全監(jiān)控系統(tǒng)
、塔機黑匣子等
。創(chuàng)建至今始終關(guān)注用戶需求
黑匣子塔吊安全監(jiān)控系統(tǒng)的特點包括:
1. 實時監(jiān)控:黑匣子塔吊安全監(jiān)控系統(tǒng)能夠?qū)崟r監(jiān)控塔吊的工作狀態(tài)和運行情況,及時發(fā)現(xiàn)異常情況。
2. 多種監(jiān)控手段:系統(tǒng)采用多種監(jiān)控手段,包括視頻監(jiān)控、傳感器監(jiān)測等,可以地監(jiān)控塔吊的各個方面。
3. 數(shù)據(jù)記錄和分析:系統(tǒng)能夠記錄塔吊的工作數(shù)據(jù),并進行分析,以便對塔吊的運行情況進行評估和改進。
4. 報警功能:系統(tǒng)能夠根據(jù)事先設(shè)定的安全參數(shù),發(fā)出警報信號,提醒操作人員注意和采取相應(yīng)的措施。
5. 遠(yuǎn)程控制:系統(tǒng)支持遠(yuǎn)程控制功能,操作人員可以通過遠(yuǎn)程控制臺對塔吊進行控制和監(jiān)控,提高工作效率和安全性。
6. 系統(tǒng)集成:黑匣子塔吊安全監(jiān)控系統(tǒng)可以與其他安全設(shè)備和系統(tǒng)進行集成,實現(xiàn)全面的安全管理。
7. 數(shù)據(jù)傳輸和存儲:系統(tǒng)能夠?qū)⒈O(jiān)控數(shù)據(jù)進行傳輸和存儲,以備后續(xù)分析和查詢使用
,為用戶提供有的產(chǎn)品和服務(wù)。
- 當(dāng)前位置:首頁
> 供應(yīng)商機
> 塔機黑匣子 > 合肥碰撞塔機黑匣子安裝 多限位監(jiān)測
-
噴淋聯(lián)動 噴淋范圍廣 運行平穩(wěn) 噪音小
塔吊防碰撞系統(tǒng) 方便診斷塔機狀態(tài) 自動變焦智能化跟蹤
塔機防碰撞監(jiān)控系統(tǒng) 便于監(jiān)督和管理 主要應(yīng)用于塔機的實時監(jiān)控
蕪湖塔吊安全監(jiān)控系統(tǒng)廠家 外觀簡潔大方 減少盲吊引發(fā)的事故
塔吊安全監(jiān)控系統(tǒng)訂購 穩(wěn)定性高 結(jié)構(gòu)清晰穩(wěn)定
吊鉤可視化監(jiān)控系統(tǒng)型號 外觀簡潔大方 信號穩(wěn)定 抗干擾性強
宿州塔機吊鉤追蹤安全系統(tǒng)廠家 提高工作效率 結(jié)構(gòu)清晰穩(wěn)定
黃山塔機吊鉤追蹤安全系統(tǒng)價格 可遠(yuǎn)程查看 減少盲吊引發(fā)的事故
淮南吊鉤可視化系統(tǒng)訂購 外觀簡潔大方 體積小 占用空間小
蕪湖小車吊鉤可視化廠家 穩(wěn)定性高 可視吊裝 降低盲吊風(fēng)險
合肥碰撞塔機黑匣子安裝 多限位監(jiān)測
產(chǎn)品描述
別名塔吊黑匣子
適用機械塔吊
顯示器觸摸屏
類型網(wǎng)絡(luò)集成系統(tǒng)
用途工地
可否定制可以
可售賣地全國
人臉識別方式人臉、密碼
發(fā)貨方式快遞
軟件形式可提供協(xié)議
適用范圍塔吊
能否對接平臺能
名稱塔吊黑匣子
塔機黑匣子在對塔吊實現(xiàn)現(xiàn)場安全監(jiān)控的同時,通過遠(yuǎn)程高速無線數(shù)據(jù)傳輸,將塔吊運行工況安全數(shù)據(jù)和報警信息通過移動互聯(lián)網(wǎng)(2G/3G)實時發(fā)送到遠(yuǎn)程物聯(lián)網(wǎng)監(jiān)控平臺,并能在報警時自動觸發(fā)手機短信向相關(guān)人員告知,從而實現(xiàn)實時的動態(tài)遠(yuǎn)程監(jiān)控、遠(yuǎn)程報警,使得塔吊安全監(jiān)控成為開放的實時動態(tài)監(jiān)控。黑匣子塔吊安全監(jiān)控系統(tǒng)的特點包括:
1. 實時監(jiān)控:黑匣子塔吊安全監(jiān)控系統(tǒng)能夠?qū)崟r監(jiān)控塔吊的工作狀態(tài)和運行情況,及時發(fā)現(xiàn)異常情況。
2. 多種監(jiān)控手段:系統(tǒng)采用多種監(jiān)控手段,包括視頻監(jiān)控、傳感器監(jiān)測等,可以地監(jiān)控塔吊的各個方面。
3. 數(shù)據(jù)記錄和分析:系統(tǒng)能夠記錄塔吊的工作數(shù)據(jù),并進行分析,以便對塔吊的運行情況進行評估和改進。
4. 報警功能:系統(tǒng)能夠根據(jù)事先設(shè)定的安全參數(shù),發(fā)出警報信號,提醒操作人員注意和采取相應(yīng)的措施。
5. 遠(yuǎn)程控制:系統(tǒng)支持遠(yuǎn)程控制功能,操作人員可以通過遠(yuǎn)程控制臺對塔吊進行控制和監(jiān)控,提高工作效率和安全性。
6. 系統(tǒng)集成:黑匣子塔吊安全監(jiān)控系統(tǒng)可以與其他安全設(shè)備和系統(tǒng)進行集成,實現(xiàn)全面的安全管理。
7. 數(shù)據(jù)傳輸和存儲:系統(tǒng)能夠?qū)⒈O(jiān)控數(shù)據(jù)進行傳輸和存儲,以備后續(xù)分析和查詢使用
。
8. 用戶友好性:系統(tǒng)界面簡潔明了
8. 用戶友好性:系統(tǒng)界面簡潔明了
,操作簡單易懂,方便用戶使用和管理。
總的來說,黑匣子塔吊安全監(jiān)控系統(tǒng)通過實時監(jiān)控、多種監(jiān)控手段、數(shù)據(jù)記錄和分析、報警功能、遠(yuǎn)程控制、系統(tǒng)集成、數(shù)據(jù)傳輸和存儲等特點,提高了塔吊的安全性和工作效率。
回轉(zhuǎn)塔機黑匣子的特點主要包括以下幾個方面:
1. 實時監(jiān)測:回轉(zhuǎn)塔機黑匣子能夠?qū)崟r監(jiān)測塔機的工作狀態(tài)和運行數(shù)據(jù),包括高度、角度、起重量等信息。
2. 數(shù)據(jù)記錄:黑匣子能夠記錄塔機的工作數(shù)據(jù),包括起重量、工作時間、起重高度等,以便后續(xù)分析和統(tǒng)計。
3. 故障診斷:黑匣子能夠監(jiān)測塔機的故障信息,并能夠提供相應(yīng)的故障診斷和報警功能,及時發(fā)現(xiàn)和解決問題。
4. 安全保護:黑匣子能夠監(jiān)測塔機的工作狀態(tài),一旦發(fā)現(xiàn)異常情況,如超載、傾斜等,能夠及時報警并采取相應(yīng)的安全保護措施,**工作安全。
5. 遠(yuǎn)程監(jiān)控:黑匣子能夠通過網(wǎng)絡(luò)連接,實現(xiàn)對塔機的遠(yuǎn)程監(jiān)控和管理,方便操作人員進行實時掌控和調(diào)度。
6. 數(shù)據(jù)分析:通過對黑匣子記錄的工作數(shù)據(jù)進行分析
總的來說,黑匣子塔吊安全監(jiān)控系統(tǒng)通過實時監(jiān)控、多種監(jiān)控手段、數(shù)據(jù)記錄和分析、報警功能、遠(yuǎn)程控制、系統(tǒng)集成、數(shù)據(jù)傳輸和存儲等特點,提高了塔吊的安全性和工作效率。
回轉(zhuǎn)塔機黑匣子的特點主要包括以下幾個方面:
1. 實時監(jiān)測:回轉(zhuǎn)塔機黑匣子能夠?qū)崟r監(jiān)測塔機的工作狀態(tài)和運行數(shù)據(jù),包括高度、角度、起重量等信息。
2. 數(shù)據(jù)記錄:黑匣子能夠記錄塔機的工作數(shù)據(jù),包括起重量、工作時間、起重高度等,以便后續(xù)分析和統(tǒng)計。
3. 故障診斷:黑匣子能夠監(jiān)測塔機的故障信息,并能夠提供相應(yīng)的故障診斷和報警功能,及時發(fā)現(xiàn)和解決問題。
4. 安全保護:黑匣子能夠監(jiān)測塔機的工作狀態(tài),一旦發(fā)現(xiàn)異常情況,如超載、傾斜等,能夠及時報警并采取相應(yīng)的安全保護措施,**工作安全。
5. 遠(yuǎn)程監(jiān)控:黑匣子能夠通過網(wǎng)絡(luò)連接,實現(xiàn)對塔機的遠(yuǎn)程監(jiān)控和管理,方便操作人員進行實時掌控和調(diào)度。
6. 數(shù)據(jù)分析:通過對黑匣子記錄的工作數(shù)據(jù)進行分析
,可以了解塔機的工作效率
、使用情況等,為后續(xù)的工作優(yōu)化和管理提供參考依據(jù)
。
總的來說
總的來說
,回轉(zhuǎn)塔機黑匣子通過實時監(jiān)測、數(shù)據(jù)記錄
、故障診斷、安全保護
、遠(yuǎn)程監(jiān)控和數(shù)據(jù)分析等功能
,提高了塔機的工作效率和安全性,同時也方便了管理和調(diào)度
。
黑匣子塔吊安全監(jiān)控系統(tǒng)的功能包括以下幾個方面:
1. 實時監(jiān)控:系統(tǒng)能夠?qū)崟r監(jiān)控塔吊的工作狀態(tài)
黑匣子塔吊安全監(jiān)控系統(tǒng)的功能包括以下幾個方面:
1. 實時監(jiān)控:系統(tǒng)能夠?qū)崟r監(jiān)控塔吊的工作狀態(tài)
、位置、高度
、角度等信息,以及吊鉤的負(fù)載情況,確保塔吊的正常運行。
2. 報警功能:系統(tǒng)能夠根據(jù)設(shè)定的安全參數(shù),監(jiān)測塔吊的工作狀態(tài),并在異常情況下發(fā)出警報,如超載、傾斜、高度超限等,及時提醒操作人員采取相應(yīng)的措施。
3. 數(shù)據(jù)記錄與分析:系統(tǒng)能夠記錄塔吊的工作數(shù)據(jù),并對數(shù)據(jù)進行分析,以便后續(xù)的安全評估和優(yōu)化。
4. 遠(yuǎn)程控制:系統(tǒng)能夠?qū)崿F(xiàn)對塔吊的遠(yuǎn)程控制,包括啟動、停止、轉(zhuǎn)動
2. 報警功能:系統(tǒng)能夠根據(jù)設(shè)定的安全參數(shù),監(jiān)測塔吊的工作狀態(tài),并在異常情況下發(fā)出警報,如超載、傾斜、高度超限等,及時提醒操作人員采取相應(yīng)的措施。
3. 數(shù)據(jù)記錄與分析:系統(tǒng)能夠記錄塔吊的工作數(shù)據(jù),并對數(shù)據(jù)進行分析,以便后續(xù)的安全評估和優(yōu)化。
4. 遠(yuǎn)程控制:系統(tǒng)能夠?qū)崿F(xiàn)對塔吊的遠(yuǎn)程控制,包括啟動、停止、轉(zhuǎn)動
、升降等操作
,提高操作的便捷性和安全性
。
5. 視頻監(jiān)控:系統(tǒng)能夠通過攝像頭對塔吊的工作情況進行實時監(jiān)控和錄像,以便事后的回放和分析
5. 視頻監(jiān)控:系統(tǒng)能夠通過攝像頭對塔吊的工作情況進行實時監(jiān)控和錄像,以便事后的回放和分析
。
6. 數(shù)據(jù)傳輸與共享:系統(tǒng)能夠?qū)⒈O(jiān)控數(shù)據(jù)傳輸?shù)皆贫嘶蚱渌K端設(shè)備
6. 數(shù)據(jù)傳輸與共享:系統(tǒng)能夠?qū)⒈O(jiān)控數(shù)據(jù)傳輸?shù)皆贫嘶蚱渌K端設(shè)備
,實現(xiàn)數(shù)據(jù)的共享和遠(yuǎn)程訪問。
7. 統(tǒng)計報表:系統(tǒng)能夠生成塔吊的工作統(tǒng)計報表
7. 統(tǒng)計報表:系統(tǒng)能夠生成塔吊的工作統(tǒng)計報表
,包括工作時間、負(fù)載情況
、異常事件等
,方便管理人員進行監(jiān)督和決策
。
總的來說
總的來說
,黑匣子塔吊安全監(jiān)控系統(tǒng)的功能旨在提高塔吊的安全性和工作效率
,減少事故風(fēng)險
,并為管理人員提供數(shù)據(jù)支持和決策參考
。
小型塔吊黑匣子的特點包括:
1. 尺寸小巧:相比于傳統(tǒng)大型塔吊,小型塔吊黑匣子的尺寸更小
小型塔吊黑匣子的特點包括:
1. 尺寸小巧:相比于傳統(tǒng)大型塔吊,小型塔吊黑匣子的尺寸更小
,體積更小
,更適合在狹小的工地空間中使用
。
2. 輕便靈活:小型塔吊黑匣子通常采用輕質(zhì)材料制造
2. 輕便靈活:小型塔吊黑匣子通常采用輕質(zhì)材料制造
,重量較輕,便于搬運和安裝
。同時
,它們也具備良好的靈活性,可以進行快速的移動和調(diào)整
。
3. 節(jié)能:小型塔吊黑匣子通常采用的電動或液壓系統(tǒng),具備節(jié)能的特點
3. 節(jié)能:小型塔吊黑匣子通常采用的電動或液壓系統(tǒng),具備節(jié)能的特點
。相比于傳統(tǒng)的燃油塔吊
,它們更環(huán)保,更節(jié)能
。
4. 多功能性:小型塔吊黑匣子通常具備多種功能
4. 多功能性:小型塔吊黑匣子通常具備多種功能
,可以完成吊裝、起重
、搬運等多種任務(wù)。它們可以配備不同的附件和工具
,以適應(yīng)不同的工地需求
。
5. 智能化控制:小型塔吊黑匣子通常采用的智能控制系統(tǒng),具備自動化和遠(yuǎn)程控制的功能
5. 智能化控制:小型塔吊黑匣子通常采用的智能控制系統(tǒng),具備自動化和遠(yuǎn)程控制的功能
。操作人員可以通過電腦或移動設(shè)備對其進行監(jiān)控和控制
,提高工作效率和安全性
。
總的來說
總的來說
,小型塔吊黑匣子具備尺寸小巧、輕便靈活
、節(jié)能
、多功能性和智能化控制等特點,適用于狹小的工地空間
,能夠提高工作效率和安全性。
傾翻塔機黑匣子是一種用于記錄和存儲塔機工作數(shù)據(jù)的設(shè)備
傾翻塔機黑匣子是一種用于記錄和存儲塔機工作數(shù)據(jù)的設(shè)備
。其主要特點包括:
1. 數(shù)據(jù)記錄功能:傾翻塔機黑匣子能夠記錄塔機的工作數(shù)據(jù)
1. 數(shù)據(jù)記錄功能:傾翻塔機黑匣子能夠記錄塔機的工作數(shù)據(jù)
,包括起重重量
、起重高度、起重速度
、傾角、工作時間等
。
2. 數(shù)據(jù)存儲能力:黑匣子具有較大的存儲容量
2. 數(shù)據(jù)存儲能力:黑匣子具有較大的存儲容量
,能夠長時間記錄塔機的工作數(shù)據(jù),以便后續(xù)分析和查看
。
3. 數(shù)據(jù)傳輸功能:黑匣子可以通過無線或有線方式將記錄的數(shù)據(jù)傳輸?shù)酵獠吭O(shè)備
3. 數(shù)據(jù)傳輸功能:黑匣子可以通過無線或有線方式將記錄的數(shù)據(jù)傳輸?shù)酵獠吭O(shè)備
,如電腦、手機等
,方便用戶進行數(shù)據(jù)分析和管理。
4. 防護性能:黑匣子通常具有防水
4. 防護性能:黑匣子通常具有防水
、防塵
、抗震等性能,能夠在惡劣的工作環(huán)境下正常工作
,并保護數(shù)據(jù)的安全性
。
5. 實時監(jiān)控功能:一些的黑匣子還具備實時監(jiān)控功能,能夠?qū)λC的工作狀態(tài)進行實時監(jiān)測
5. 實時監(jiān)控功能:一些的黑匣子還具備實時監(jiān)控功能,能夠?qū)λC的工作狀態(tài)進行實時監(jiān)測
,及時發(fā)現(xiàn)異常情況并進行預(yù)警。
6. 數(shù)據(jù)分析功能:黑匣子的數(shù)據(jù)可以通過專門的軟件進行分析和處理
6. 數(shù)據(jù)分析功能:黑匣子的數(shù)據(jù)可以通過專門的軟件進行分析和處理
,幫助用戶了解塔機的工作情況
,提供參考和改進建議。
總的來說
總的來說
,傾翻塔機黑匣子具有數(shù)據(jù)記錄
、存儲、傳輸
、防護、監(jiān)控和分析等功能
,能夠提高塔機的工作效率和安全性
。
塔吊防碰撞系統(tǒng)的特點主要包括以下幾個方面:
1. 實時監(jiān)測:塔吊防碰撞系統(tǒng)能夠?qū)崟r監(jiān)測塔吊的位置、高度
塔吊防碰撞系統(tǒng)的特點主要包括以下幾個方面:
1. 實時監(jiān)測:塔吊防碰撞系統(tǒng)能夠?qū)崟r監(jiān)測塔吊的位置、高度
、姿態(tài)等參數(shù)
,以及周圍的障礙物位置和移動情況,保證對塔吊的全程監(jiān)控
。
2. 高精度定位:系統(tǒng)采用高精度的定位技術(shù)
2. 高精度定位:系統(tǒng)采用高精度的定位技術(shù)
,能夠準(zhǔn)確計算塔吊的位置和姿態(tài)
,確保監(jiān)測的準(zhǔn)確性和可靠性
。
3. 智能分析:系統(tǒng)能夠?qū)ΡO(jiān)測到的數(shù)據(jù)進行智能分析,判斷塔吊與障礙物之間的距離和相對位置
3. 智能分析:系統(tǒng)能夠?qū)ΡO(jiān)測到的數(shù)據(jù)進行智能分析,判斷塔吊與障礙物之間的距離和相對位置
,以及是否存在碰撞風(fēng)險,并及時發(fā)出警報
。
4. 報警:系統(tǒng)設(shè)有報警機制,當(dāng)檢測到碰撞風(fēng)險時,會通過聲音、光線、振動等多種方式發(fā)出警報,提醒操作人員采取相應(yīng)的措施。
5. 數(shù)據(jù)記錄與分析:系統(tǒng)能夠記錄和存儲塔吊的監(jiān)測數(shù)據(jù),包括位置、高度、姿態(tài)等信息,以便后續(xù)的數(shù)據(jù)分析和統(tǒng)計,為工程管理提供參考依據(jù)。
6. 靈活可調(diào):系統(tǒng)具有一定的靈活性和可調(diào)性,可以根據(jù)具體的施工場景和需求進行調(diào)整和配置,以滿足不同工程的要求。
7. 可擴展性:系統(tǒng)具有一定的擴展性,可以與其他設(shè)備和系統(tǒng)進行集成
4. 報警:系統(tǒng)設(shè)有報警機制,當(dāng)檢測到碰撞風(fēng)險時,會通過聲音、光線、振動等多種方式發(fā)出警報,提醒操作人員采取相應(yīng)的措施。
5. 數(shù)據(jù)記錄與分析:系統(tǒng)能夠記錄和存儲塔吊的監(jiān)測數(shù)據(jù),包括位置、高度、姿態(tài)等信息,以便后續(xù)的數(shù)據(jù)分析和統(tǒng)計,為工程管理提供參考依據(jù)。
6. 靈活可調(diào):系統(tǒng)具有一定的靈活性和可調(diào)性,可以根據(jù)具體的施工場景和需求進行調(diào)整和配置,以滿足不同工程的要求。
7. 可擴展性:系統(tǒng)具有一定的擴展性,可以與其他設(shè)備和系統(tǒng)進行集成
,如塔吊遠(yuǎn)程監(jiān)控系統(tǒng)、人員定位系統(tǒng)等
,實現(xiàn)更全面的工程管理和安全監(jiān)控
。
總的來說
總的來說
,塔吊防碰撞系統(tǒng)通過實時監(jiān)測
、高精度定位、智能分析等技術(shù)手段
,能夠有效預(yù)防塔吊與障礙物的碰撞
,提高工程施工的安全性和效率。
塔吊黑匣子防碰撞系統(tǒng)的特點包括:
1. 實時監(jiān)測:系統(tǒng)能夠?qū)崟r監(jiān)測塔吊的運動狀態(tài)和周圍環(huán)境,包括其他塔吊
塔吊黑匣子防碰撞系統(tǒng)的特點包括:
1. 實時監(jiān)測:系統(tǒng)能夠?qū)崟r監(jiān)測塔吊的運動狀態(tài)和周圍環(huán)境,包括其他塔吊
、建筑物、障礙物等
。
2. 高精度定位:系統(tǒng)采用高精度的定位技術(shù)
2. 高精度定位:系統(tǒng)采用高精度的定位技術(shù)
,能夠準(zhǔn)確計算塔吊的位置和姿態(tài)。
3. 智能分析:系統(tǒng)能夠智能分析塔吊的運動軌跡和周圍環(huán)境的變化,根據(jù)預(yù)設(shè)的規(guī)則進行判斷和預(yù)警。
4. 實時警報:系統(tǒng)能夠及時發(fā)出警報,提醒操作人員注意可能的碰撞風(fēng)險,并采取相應(yīng)的措施避免事故發(fā)生。
5. 多層保護:系統(tǒng)采用多層次的保護措施,包括聲光報警、自動停機等,確保安全性能。
6. 數(shù)據(jù)記錄:系統(tǒng)能夠記錄塔吊的運行數(shù)據(jù)和碰撞事件,為事故調(diào)查和責(zé)任追究提供依據(jù)。
7. 擴展性:系統(tǒng)可以與其他設(shè)備和系統(tǒng)進行聯(lián)動,實現(xiàn)更別的安全保護。
總體來說,塔吊黑匣子防碰撞系統(tǒng)具有實時監(jiān)測、高精度定位、智能分析、實時警報、多層保護、數(shù)據(jù)記錄和擴展性等特點,能夠提高塔吊的安全性能,減少碰撞事故的發(fā)生。
塔吊塔機黑匣子安全監(jiān)測系統(tǒng)的功能主要包括以下幾個方面:
1. 塔吊塔機的運行狀態(tài)監(jiān)測:通過傳感器和監(jiān)測設(shè)備實時監(jiān)測塔吊塔機的各項運行參數(shù),如起重量、傾角、回轉(zhuǎn)角度、高度等,以確保塔吊塔機的正常運行。
2. 風(fēng)速監(jiān)測和預(yù)警:通過風(fēng)速傳感器監(jiān)測周圍環(huán)境的風(fēng)速,并根據(jù)預(yù)設(shè)的安全閾值進行實時預(yù)警,以避免在高風(fēng)速環(huán)境下使用塔吊塔機造成的安全隱患。
3. 傾斜度監(jiān)測和報警:通過傾斜度傳感器監(jiān)測塔吊塔機的傾斜度,并在傾斜度超過預(yù)設(shè)閾值時發(fā)出報警信號,以防止塔吊塔機因傾斜而發(fā)生傾覆事故
,會自動記錄相關(guān)數(shù)據(jù)3. 智能分析:系統(tǒng)能夠智能分析塔吊的運動軌跡和周圍環(huán)境的變化,根據(jù)預(yù)設(shè)的規(guī)則進行判斷和預(yù)警。
4. 實時警報:系統(tǒng)能夠及時發(fā)出警報,提醒操作人員注意可能的碰撞風(fēng)險,并采取相應(yīng)的措施避免事故發(fā)生。
5. 多層保護:系統(tǒng)采用多層次的保護措施,包括聲光報警、自動停機等,確保安全性能。
6. 數(shù)據(jù)記錄:系統(tǒng)能夠記錄塔吊的運行數(shù)據(jù)和碰撞事件,為事故調(diào)查和責(zé)任追究提供依據(jù)。
7. 擴展性:系統(tǒng)可以與其他設(shè)備和系統(tǒng)進行聯(lián)動,實現(xiàn)更別的安全保護。
總體來說,塔吊黑匣子防碰撞系統(tǒng)具有實時監(jiān)測、高精度定位、智能分析、實時警報、多層保護、數(shù)據(jù)記錄和擴展性等特點,能夠提高塔吊的安全性能,減少碰撞事故的發(fā)生。
塔吊塔機黑匣子安全監(jiān)測系統(tǒng)的功能主要包括以下幾個方面:
1. 塔吊塔機的運行狀態(tài)監(jiān)測:通過傳感器和監(jiān)測設(shè)備實時監(jiān)測塔吊塔機的各項運行參數(shù),如起重量、傾角、回轉(zhuǎn)角度、高度等,以確保塔吊塔機的正常運行。
2. 風(fēng)速監(jiān)測和預(yù)警:通過風(fēng)速傳感器監(jiān)測周圍環(huán)境的風(fēng)速,并根據(jù)預(yù)設(shè)的安全閾值進行實時預(yù)警,以避免在高風(fēng)速環(huán)境下使用塔吊塔機造成的安全隱患。
3. 傾斜度監(jiān)測和報警:通過傾斜度傳感器監(jiān)測塔吊塔機的傾斜度,并在傾斜度超過預(yù)設(shè)閾值時發(fā)出報警信號,以防止塔吊塔機因傾斜而發(fā)生傾覆事故
。
4. 載荷監(jiān)測和報警:通過載荷傳感器監(jiān)測塔吊塔機的實際載荷,并與額定載荷進行比較,一旦超過額定載荷就會觸發(fā)報警系統(tǒng),以防止超載運行導(dǎo)致的塔吊塔機事故。
5. 高度監(jiān)測和預(yù)警:通過高度傳感器監(jiān)測塔吊塔機的高度,并在接近或超過安全高度限制時發(fā)出預(yù)警信號,以確保塔吊塔機操作在安全范圍內(nèi)。
6. 數(shù)據(jù)記錄和分析:系統(tǒng)可以記錄和存儲塔吊塔機的運行數(shù)據(jù),包括各項參數(shù)的變化情況和報警記錄等,以便事后分析和查找安全事故的原因。
7. 遠(yuǎn)程監(jiān)控和控制:系統(tǒng)可以通過網(wǎng)絡(luò)連接實現(xiàn)對塔吊塔機的遠(yuǎn)程監(jiān)控和控制,操作人員可以隨時隨地通過終端設(shè)備查看塔吊塔機的運行狀態(tài),并進行必要的操作和調(diào)整。
總的來說,塔吊塔機黑匣子安全監(jiān)測系統(tǒng)通過實時監(jiān)測和預(yù)警,提供了對塔吊塔機運行狀態(tài)的全面監(jiān)控,旨在提高塔吊塔機的安全性能,預(yù)防事故的發(fā)生。
回轉(zhuǎn)塔機黑匣子是一種用于監(jiān)測和記錄回轉(zhuǎn)塔機操作數(shù)據(jù)的設(shè)備,其主要功能包括:
1. 數(shù)據(jù)記錄:黑匣子能夠記錄回轉(zhuǎn)塔機的操作數(shù)據(jù),如起重量、起重高度、起重速度、回轉(zhuǎn)速度、傾斜角度等。這些數(shù)據(jù)可以用于后續(xù)的分析和報告。
2. 故障診斷:黑匣子能夠監(jiān)測回轉(zhuǎn)塔機的運行狀態(tài),一旦發(fā)現(xiàn)異?div id="4qifd00" class="flower right">
;蚬收?div id="4qifd00" class="flower right">4. 載荷監(jiān)測和報警:通過載荷傳感器監(jiān)測塔吊塔機的實際載荷,并與額定載荷進行比較,一旦超過額定載荷就會觸發(fā)報警系統(tǒng),以防止超載運行導(dǎo)致的塔吊塔機事故。
5. 高度監(jiān)測和預(yù)警:通過高度傳感器監(jiān)測塔吊塔機的高度,并在接近或超過安全高度限制時發(fā)出預(yù)警信號,以確保塔吊塔機操作在安全范圍內(nèi)。
6. 數(shù)據(jù)記錄和分析:系統(tǒng)可以記錄和存儲塔吊塔機的運行數(shù)據(jù),包括各項參數(shù)的變化情況和報警記錄等,以便事后分析和查找安全事故的原因。
7. 遠(yuǎn)程監(jiān)控和控制:系統(tǒng)可以通過網(wǎng)絡(luò)連接實現(xiàn)對塔吊塔機的遠(yuǎn)程監(jiān)控和控制,操作人員可以隨時隨地通過終端設(shè)備查看塔吊塔機的運行狀態(tài),并進行必要的操作和調(diào)整。
總的來說,塔吊塔機黑匣子安全監(jiān)測系統(tǒng)通過實時監(jiān)測和預(yù)警,提供了對塔吊塔機運行狀態(tài)的全面監(jiān)控,旨在提高塔吊塔機的安全性能,預(yù)防事故的發(fā)生。
回轉(zhuǎn)塔機黑匣子是一種用于監(jiān)測和記錄回轉(zhuǎn)塔機操作數(shù)據(jù)的設(shè)備,其主要功能包括:
1. 數(shù)據(jù)記錄:黑匣子能夠記錄回轉(zhuǎn)塔機的操作數(shù)據(jù),如起重量、起重高度、起重速度、回轉(zhuǎn)速度、傾斜角度等。這些數(shù)據(jù)可以用于后續(xù)的分析和報告。
2. 故障診斷:黑匣子能夠監(jiān)測回轉(zhuǎn)塔機的運行狀態(tài),一旦發(fā)現(xiàn)異?div id="4qifd00" class="flower right">
,以便后續(xù)進行故障診斷和修復(fù)。
3. 安全監(jiān)控:黑匣子能夠監(jiān)測回轉(zhuǎn)塔機的工作狀態(tài)
3. 安全監(jiān)控:黑匣子能夠監(jiān)測回轉(zhuǎn)塔機的工作狀態(tài)
,如是否超載
、是否超速、是否等
。一旦發(fā)現(xiàn)安全風(fēng)險,會及時發(fā)出警報
,以**操作人員和周圍環(huán)境的安全
。
4. 遠(yuǎn)程監(jiān)控:黑匣子可以通過網(wǎng)絡(luò)連接,實現(xiàn)對回轉(zhuǎn)塔機的遠(yuǎn)程監(jiān)控和管理
4. 遠(yuǎn)程監(jiān)控:黑匣子可以通過網(wǎng)絡(luò)連接,實現(xiàn)對回轉(zhuǎn)塔機的遠(yuǎn)程監(jiān)控和管理
。操作人員可以隨時隨地查看回轉(zhuǎn)塔機的工作狀態(tài)和操作數(shù)據(jù)
,并進行遠(yuǎn)程控制和調(diào)整。
5. 數(shù)據(jù)分析:黑匣子記錄的操作數(shù)據(jù)可以進行數(shù)據(jù)分析
5. 數(shù)據(jù)分析:黑匣子記錄的操作數(shù)據(jù)可以進行數(shù)據(jù)分析
,以評估回轉(zhuǎn)塔機的工作效率和性能
,并提供改進建議
。這有助于優(yōu)化回轉(zhuǎn)塔機的使用和維護
,提高工作效率和安全性。
總的來說
總的來說
,回轉(zhuǎn)塔機黑匣子的功能是監(jiān)測
、記錄、診斷和分析回轉(zhuǎn)塔機的操作數(shù)據(jù)
,以提高工作效率
、安全性和管理效能。
塔吊防碰撞系統(tǒng)的功能主要包括以下幾個方面:
1. 碰撞預(yù)警:通過安裝在塔吊上的傳感器,實時監(jiān)測周圍環(huán)境,包括其他塔吊、建筑物、電線等障礙物的位置和距離。一旦檢測到潛在的碰撞風(fēng)險,系統(tǒng)會發(fā)出警報,提醒操作人員及時采取措施避免碰撞
塔吊防碰撞系統(tǒng)的功能主要包括以下幾個方面:
1. 碰撞預(yù)警:通過安裝在塔吊上的傳感器,實時監(jiān)測周圍環(huán)境,包括其他塔吊、建筑物、電線等障礙物的位置和距離。一旦檢測到潛在的碰撞風(fēng)險,系統(tǒng)會發(fā)出警報,提醒操作人員及時采取措施避免碰撞
。
2. 防止交叉碰撞:當(dāng)多臺塔吊同時工作時,系統(tǒng)能夠計算各個塔吊的位置和運動軌跡
2. 防止交叉碰撞:當(dāng)多臺塔吊同時工作時,系統(tǒng)能夠計算各個塔吊的位置和運動軌跡
,并根據(jù)這些數(shù)據(jù)進行分析
,避免塔吊之間的交叉碰撞
。如果系統(tǒng)檢測到塔吊之間存在潛在的碰撞風(fēng)險
,會自動發(fā)出警報
,并提供相應(yīng)的建議或指令。
3. 防止碰撞建筑物:塔吊防碰撞系統(tǒng)還可以監(jiān)測周圍建筑物的位置和高度
3. 防止碰撞建筑物:塔吊防碰撞系統(tǒng)還可以監(jiān)測周圍建筑物的位置和高度
,并根據(jù)塔吊的運動軌跡進行計算和分析
,避免塔吊與建筑物發(fā)生碰撞。系統(tǒng)會根據(jù)實時數(shù)據(jù)提供警報和建議
,幫助操作人員調(diào)整塔吊的位置和運動軌跡
,確保安全施工。
4. 數(shù)據(jù)記錄和分析:系統(tǒng)能夠記錄和存儲塔吊的運行數(shù)據(jù)
4. 數(shù)據(jù)記錄和分析:系統(tǒng)能夠記錄和存儲塔吊的運行數(shù)據(jù)
,包括位置
、運動軌跡
、碰撞預(yù)警等信息
。這些數(shù)據(jù)可以用于事故調(diào)查和分析
,幫助改進施工流程和安全管理措施
,提高施工效率和安全性。
總的來說
總的來說
,塔吊防碰撞系統(tǒng)通過實時監(jiān)測周圍環(huán)境和塔吊的運動狀態(tài)
,提供預(yù)警和建議,幫助操作人員避免碰撞事故
,**施工安全。
工地塔機黑匣子適用于以下場景:
1. 塔機安全監(jiān)測:黑匣子可以記錄塔機的運行狀態(tài)
工地塔機黑匣子適用于以下場景:
1. 塔機安全監(jiān)測:黑匣子可以記錄塔機的運行狀態(tài)
、工作時間
、載重情況等數(shù)據(jù),用于監(jiān)測塔機的安全運行情況
。
2. 事故調(diào)查:在塔機發(fā)生事故時
2. 事故調(diào)查:在塔機發(fā)生事故時
,黑匣子可以提供事故發(fā)生前的數(shù)據(jù)記錄,幫助調(diào)查人員分析事故原因
。
3. 違規(guī)違法監(jiān)測:黑匣子可以記錄塔機操作員的行為
3. 違規(guī)違法監(jiān)測:黑匣子可以記錄塔機操作員的行為
,如超載、超速等違規(guī)行為
,用于監(jiān)測和管理塔機的使用情況
。
4. 塔機維護管理:黑匣子可以記錄塔機的工作時間
4. 塔機維護管理:黑匣子可以記錄塔機的工作時間
、使用頻率等數(shù)據(jù)
,用于制定維護計劃和管理塔機的維護情況
百度首頁推廣咨詢電話:13312972391 符經(jīng)理 微信同號
。
5. 塔機性能評估:通過分析黑匣子中的數(shù)據(jù),可以評估塔機的性能和工作效率
5. 塔機性能評估:通過分析黑匣子中的數(shù)據(jù),可以評估塔機的性能和工作效率
,為塔機的選型和使用提供參考


控 歡迎咨詢")


定可靠")
測升降機")
測系統(tǒng)")
控管理系統(tǒng)")
 性能穩(wěn)定")
測系統(tǒng)調(diào)試 詳情請咨詢")
測系統(tǒng)生產(chǎn)廠家")
P塵在線監(jiān)測系統(tǒng) 符合標(biāo)準(zhǔn)")
測系統(tǒng) 價格合理")
價格")
 監(jiān)控一站式")
您是第15551246位訪客
版權(quán)所有 ©2025-09-17 皖I(lǐng)CP備2021014040號-1
安徽賽芙智能科技有限公司 保留所有權(quán)利.
百度首頁推廣咨詢電話:13312972391 符經(jīng)理 微信同號
手機網(wǎng)站
-
15655133111
地址:安徽省 合肥市 高新區(qū)玉蘭大道777號雙贏大廈10層1011-A027室
聯(lián)系人: 李經(jīng)理先生
微信帳號: