、運(yùn)行軌跡等,以便后期進(jìn)行數(shù)據(jù)分析和事故調(diào)查
。
4. 遠(yuǎn)程控制:系統(tǒng)可以通過(guò)遠(yuǎn)程控制的方式對(duì)塔機(jī)吊鉤進(jìn)行操作
,包括啟動(dòng)、停止
、調(diào)整參數(shù)等,減少人工操作的風(fēng)險(xiǎn)
。
5. 安全防護(hù):系統(tǒng)可以根據(jù)吊鉤的運(yùn)行狀態(tài)
,自動(dòng)調(diào)整塔機(jī)的工作范圍和速度,以確保吊鉤的安全運(yùn)行
,并避免發(fā)生意外事故。
總的來(lái)說(shuō)
,塔機(jī)吊鉤追蹤安全系統(tǒng)的功能是為了提高塔機(jī)吊鉤的安全性能
,減少事故發(fā)生的風(fēng)險(xiǎn),保護(hù)人員和設(shè)備的安全
。
吊鉤可視化監(jiān)控系統(tǒng)的功能包括:
1. 實(shí)時(shí)監(jiān)控:系統(tǒng)能夠?qū)崟r(shí)監(jiān)控吊鉤的工作狀態(tài),包括吊鉤的位置
、角度
、負(fù)載重量等信息,并將其實(shí)時(shí)顯示在監(jiān)控界面上
。
2. 報(bào)警功能:系統(tǒng)能夠根據(jù)預(yù)設(shè)的安全參數(shù),監(jiān)測(cè)吊鉤的工作狀態(tài)
,一旦發(fā)現(xiàn)異常情況(如超載
、傾斜等),能夠及時(shí)發(fā)出警報(bào)
,提醒操作人員。
3. 數(shù)據(jù)記錄與分析:系統(tǒng)能夠記錄吊鉤的工作數(shù)據(jù)
,包括工作時(shí)間
、負(fù)載重量、工作次數(shù)等信息
,并能夠?qū)@些數(shù)據(jù)進(jìn)行分析,為管理者提供決策依據(jù)。
4. 遠(yuǎn)程控制:系統(tǒng)能夠通過(guò)網(wǎng)絡(luò)遠(yuǎn)程控制吊鉤的操作
,包括啟動(dòng)
、停止、調(diào)整位置等功能
,方便操作人員在遠(yuǎn)程環(huán)境下進(jìn)行吊鉤的控制。
5. 視頻監(jiān)控:系統(tǒng)能夠連接攝像頭
,實(shí)時(shí)監(jiān)控吊鉤的工作情況
,并將視頻流實(shí)時(shí)傳輸?shù)奖O(jiān)控界面上,方便操作人員觀察吊鉤的工作狀態(tài)
。
6. 數(shù)據(jù)報(bào)表與導(dǎo)出:系統(tǒng)能夠生成吊鉤工作的數(shù)據(jù)報(bào)表,并支持導(dǎo)出為Excel或其他格式
,方便管理者進(jìn)行數(shù)據(jù)分析和報(bào)告
。
7. 遠(yuǎn)程維護(hù)與升級(jí):系統(tǒng)能夠支持遠(yuǎn)程維護(hù)和升級(jí),方便管理者對(duì)系統(tǒng)進(jìn)行維護(hù)和更新
,保證系統(tǒng)的穩(wěn)定性和功能的完善。
總之
,吊鉤可視化監(jiān)控系統(tǒng)通過(guò)實(shí)時(shí)監(jiān)控
、報(bào)警功能、數(shù)據(jù)記錄與分析
、遠(yuǎn)程控制、視頻監(jiān)控
、數(shù)據(jù)報(bào)表與導(dǎo)出等功能
,提供了對(duì)吊鉤工作狀態(tài)的全面監(jiān)控和管理,以確保吊鉤的安全運(yùn)行
。
小車吊鉤可視化的功能可以包括以下幾個(gè)方面:
1. 實(shí)時(shí)顯示吊鉤位置:通過(guò)傳感器獲取吊鉤的實(shí)時(shí)位置信息,并將其在可視化界面上進(jìn)行展示
,方便操作人員實(shí)時(shí)監(jiān)控吊鉤的位置
。
2. 吊鉤負(fù)載顯示:通過(guò)負(fù)載傳感器獲取吊鉤的負(fù)載信息,并將其在可視化界面上進(jìn)行展示
,以幫助操作人員了解吊鉤當(dāng)前的負(fù)載情況
。
3. 吊鉤運(yùn)動(dòng)軌跡顯示:根據(jù)吊鉤的位置信息,可視化界面可以顯示吊鉤的運(yùn)動(dòng)軌跡,方便操作人員了解吊鉤的移動(dòng)路徑
。
4. 報(bào)警功能:當(dāng)?shù)蹉^位置或負(fù)載超過(guò)設(shè)定的安全范圍時(shí),可視化界面可以發(fā)出警報(bào)
,提醒操作人員及時(shí)采取措施,確保吊鉤操作的安全性
。
5. 數(shù)據(jù)記錄和分析:可視化界面可以記錄吊鉤的位置、負(fù)載等數(shù)據(jù)
,并進(jìn)行分析和統(tǒng)計(jì)
,以便后續(xù)的數(shù)據(jù)分析和優(yōu)化。
6. 遠(yuǎn)程控制:通過(guò)可視化界面
,操作人員可以遠(yuǎn)程控制吊鉤的運(yùn)動(dòng)
,包括上下移動(dòng)
、左右移動(dòng)等操作
,提高操作的便捷性和效率。
7. 多視角顯示:可視化界面可以提供多個(gè)視角的顯示
,包括全景視圖
、俯視圖等
,以便操作人員全面了解吊鉤的狀態(tài)和周圍環(huán)境
。
總之,小車吊鉤可視化的功能主要是為了方便操作人員實(shí)時(shí)監(jiān)控吊鉤的位置
、負(fù)載等信息
,提高操作的安全性和效率
。
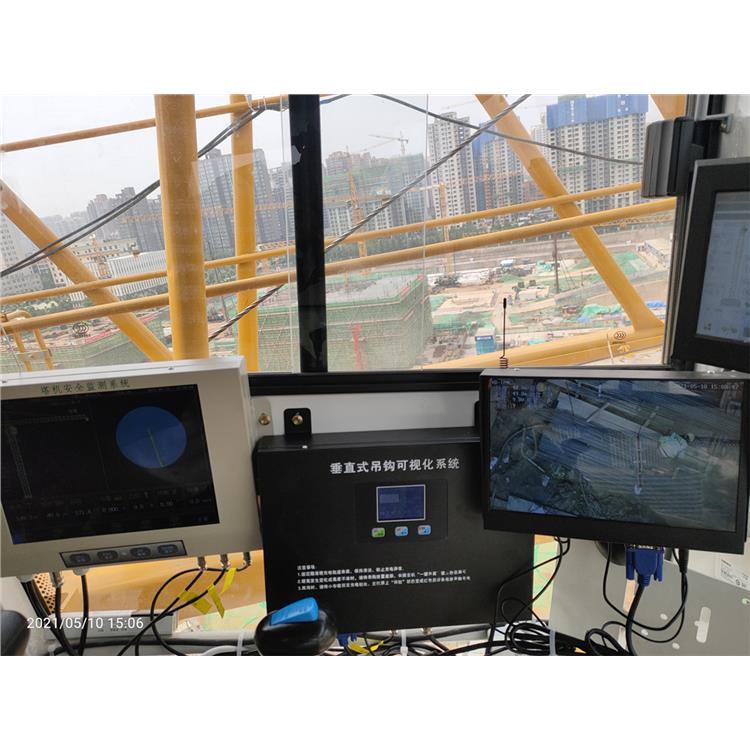
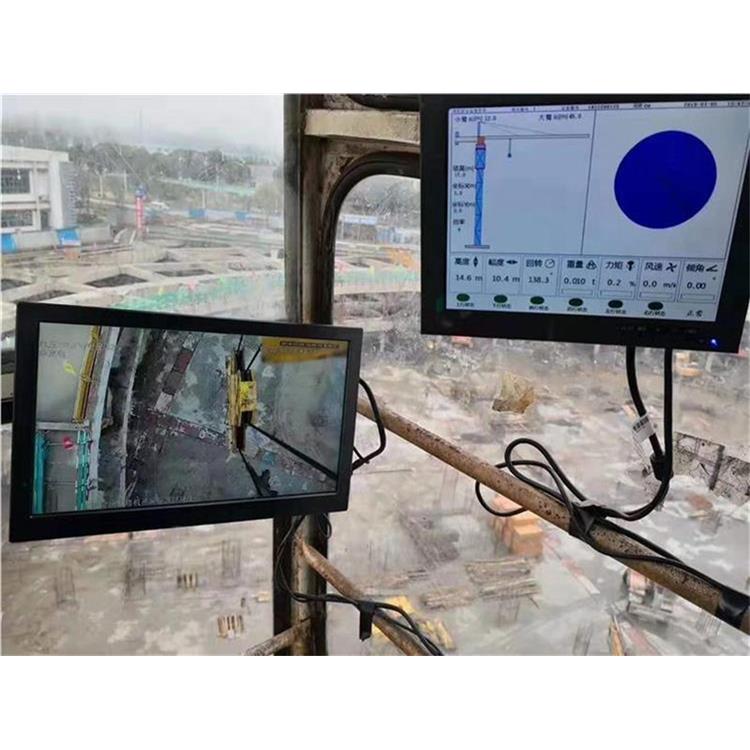
塔吊安全監(jiān)控系統(tǒng)的功能主要包括以下幾個(gè)方面:
1. 實(shí)時(shí)監(jiān)控:通過(guò)安裝在塔吊上的攝像頭
,實(shí)時(shí)監(jiān)控塔吊的工作狀態(tài),包括起重臂的位置
、高度
、角度等信息
。
2. 報(bào)警功能:系統(tǒng)能夠檢測(cè)塔吊工作中的異常情況
,并及時(shí)發(fā)出警報(bào),如起重臂位置偏離正常范圍
、超載
、傾斜等。
3. 數(shù)據(jù)記錄與分析:系統(tǒng)能夠記錄塔吊的工作數(shù)據(jù)
,包括起重臂的運(yùn)行軌跡
、工作時(shí)間、載重情況等
,同時(shí)能夠?qū)@些數(shù)據(jù)進(jìn)行分析,提供工作效率評(píng)估等功能
。
4. 遠(yuǎn)程控制:系統(tǒng)可以通過(guò)網(wǎng)絡(luò)遠(yuǎn)程控制塔吊的操作
,包括起重臂的升降、旋轉(zhuǎn)等
,提高操作的靈活性和安全性
。
5. 視頻監(jiān)控:系統(tǒng)能夠?qū)崟r(shí)傳輸塔吊上的視頻畫面
,供操作人員進(jìn)行監(jiān)控和觀察
,確保操作的安全性。
6. 風(fēng)速監(jiān)測(cè):系統(tǒng)可以監(jiān)測(cè)周圍的風(fēng)速情況
,并根據(jù)設(shè)定的風(fēng)速閾值發(fā)出警報(bào)
,以確保塔吊在惡劣天氣條件下的安全運(yùn)行
。
7. 維護(hù)管理:系統(tǒng)能夠?qū)λ醯木S護(hù)情況進(jìn)行管理
,包括設(shè)備的檢修記錄、維護(hù)計(jì)劃等
,提醒操作人員及時(shí)進(jìn)行維護(hù)和保養(yǎng)
。
總的來(lái)說(shuō)
,塔吊安全監(jiān)控系統(tǒng)能夠?qū)崟r(shí)監(jiān)控塔吊的工作狀態(tài)
,提供報(bào)警功能,記錄和分析工作數(shù)據(jù)
,遠(yuǎn)程控制操作
,視頻監(jiān)控
,風(fēng)速監(jiān)測(cè)以及維護(hù)管理等功能
,以確保塔吊的安全運(yùn)行。

小車吊鉤可視化適用范圍包括但不限于以下幾個(gè)方面:
1. 工業(yè)領(lǐng)域:小車吊鉤可視化可以應(yīng)用于工業(yè)生產(chǎn)線上的物料搬運(yùn)
、裝卸等工作
,通過(guò)可視化界面可以實(shí)時(shí)監(jiān)控吊鉤的位置
、狀態(tài)和運(yùn)行情況
,提高生產(chǎn)效率和安全性
。
2. 建筑領(lǐng)域:小車吊鉤可視化可以應(yīng)用于建筑工地上的起重作業(yè),可以實(shí)時(shí)監(jiān)控吊鉤的位置和動(dòng)作
,確保起重作業(yè)的安全性和準(zhǔn)確性
。
3. 港口和物流領(lǐng)域:小車吊鉤可視化可以應(yīng)用于港口和物流中心的貨物裝卸作業(yè),通過(guò)可視化界面可以實(shí)時(shí)監(jiān)控吊鉤的位置和狀態(tài)
,提高裝卸效率和安全性
。
4. 礦山和能源領(lǐng)域:小車吊鉤可視化可以應(yīng)用于礦山和能源設(shè)施中的起重作業(yè),可以實(shí)時(shí)監(jiān)控吊鉤的位置和動(dòng)作
,確保起重作業(yè)的安全性和準(zhǔn)確性
。
總的來(lái)說(shuō),小車吊鉤可視化適用于需要對(duì)吊鉤進(jìn)行實(shí)時(shí)監(jiān)控和控制的場(chǎng)景,可以提高作業(yè)效率










黑匣子監(jiān)控 歡迎咨詢")
黑匣子 多種型號(hào)")
黑匣子圖片 精度高")
黑匣子 穩(wěn)定可靠")
時(shí)監(jiān)測(cè)升降機(jī)")
安全監(jiān)測(cè)系統(tǒng)")
監(jiān)控管理系統(tǒng)")
系統(tǒng) 性能穩(wěn)定")
塵監(jiān)測(cè)系統(tǒng)調(diào)試 詳情請(qǐng)咨詢")
塵監(jiān)測(cè)系統(tǒng)生產(chǎn)廠家")
P塵在線監(jiān)測(cè)系統(tǒng) 符合標(biāo)準(zhǔn)")
塵在線監(jiān)測(cè)系統(tǒng) 價(jià)格合理")
價(jià)格")
 監(jiān)控一站式")