。用戶可以通過界面上的按鈕或菜單來控制吊鉤的運行和監(jiān)控
。
7. 可定制化:小車吊鉤可視化系統(tǒng)可以根據(jù)用戶的需求進行定制,可以添加或修改功能模塊
,以滿足不同用戶的特定需求
。
小車吊鉤可視化的功能可以包括以下幾個方面:
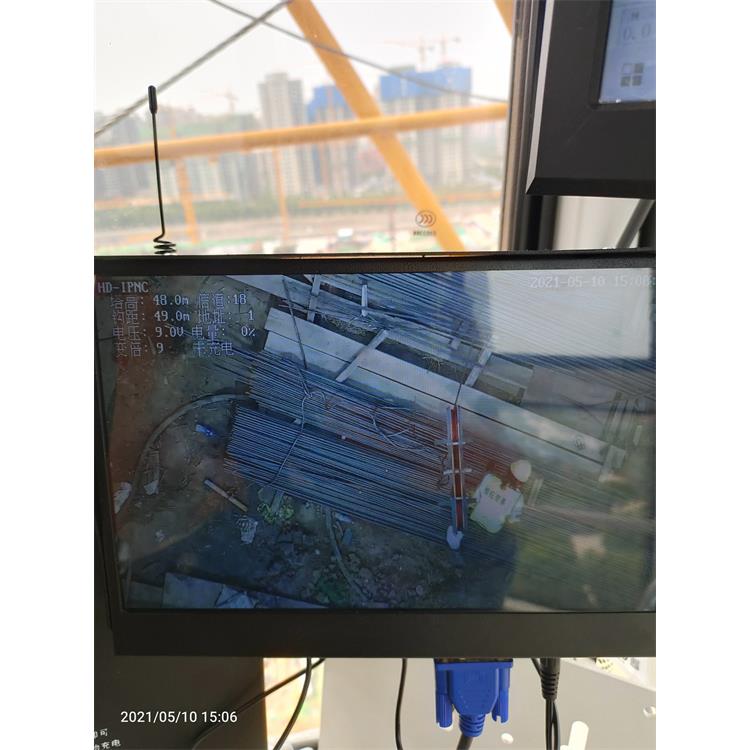
1. 實時顯示吊鉤位置:通過傳感器獲取吊鉤的實時位置信息
,并將其在可視化界面上進行展示,方便操作人員實時監(jiān)控吊鉤的位置
。
2. 吊鉤負載顯示:通過負載傳感器獲取吊鉤的負載信息
,并將其在可視化界面上進行展示,以幫助操作人員了解吊鉤當(dāng)前的負載情況
。
3. 吊鉤運動軌跡顯示:根據(jù)吊鉤的位置信息
,可視化界面可以顯示吊鉤的運動軌跡,方便操作人員了解吊鉤的移動路徑
。
4. 報警功能:當(dāng)?shù)蹉^位置或負載超過設(shè)定的安全范圍時
,可視化界面可以發(fā)出警報,提醒操作人員及時采取措施
,確保吊鉤操作的安全性
。
5. 數(shù)據(jù)記錄和分析:可視化界面可以記錄吊鉤的位置、負載等數(shù)據(jù)
,并進行分析和統(tǒng)計
,以便后續(xù)的數(shù)據(jù)分析和優(yōu)化。
6. 遠程控制:通過可視化界面
,操作人員可以遠程控制吊鉤的運動
,包括上下移動、左右移動等操作
,提高操作的便捷性和效率。
7. 多視角顯示:可視化界面可以提供多個視角的顯示
,包括全景視圖
、俯視圖等,以便操作人員全面了解吊鉤的狀態(tài)和周圍環(huán)境
。
總之
,小車吊鉤可視化的功能主要是為了方便操作人員實時監(jiān)控吊鉤的位置、負載等信息
,提高操作的安全性和效率
。
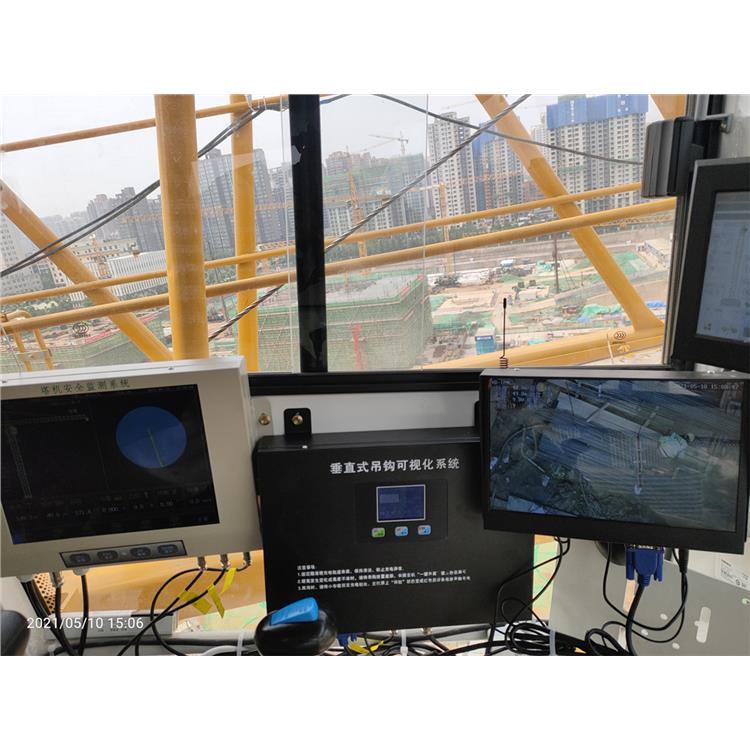
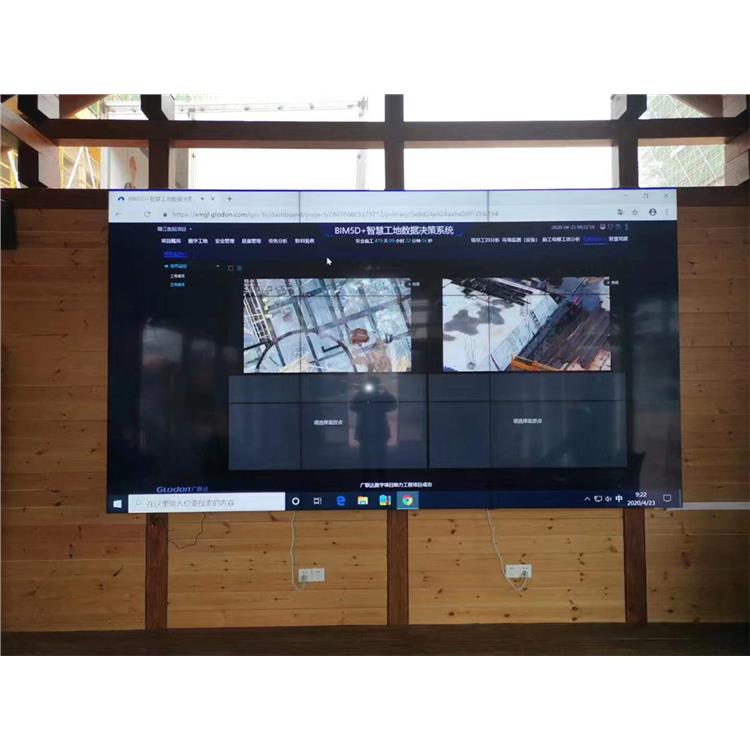
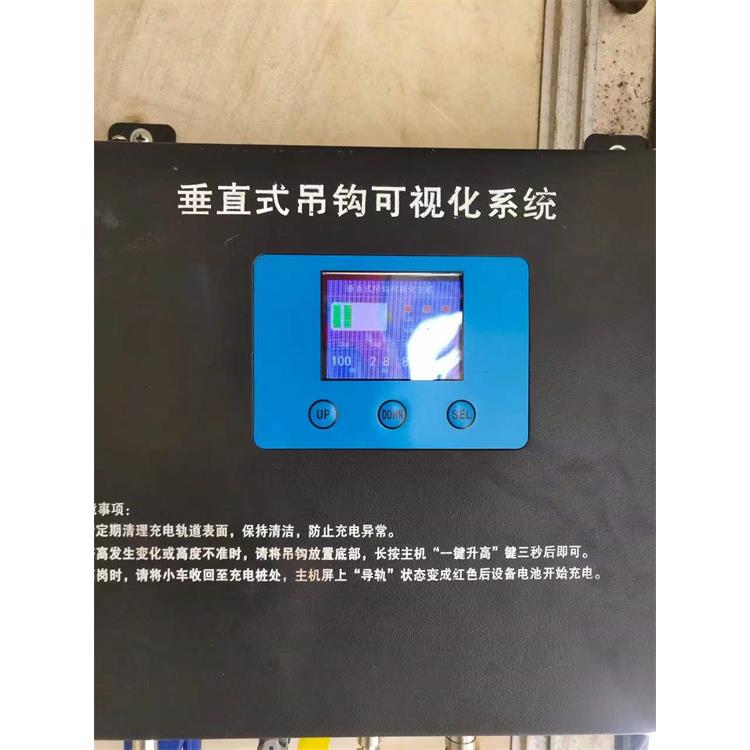
重直式吊鉤可視化系統(tǒng)的特點主要包括以下幾個方面:
1. 實時監(jiān)測:重直式吊鉤可視化系統(tǒng)能夠?qū)崟r監(jiān)測吊鉤的運行狀態(tài),包括吊鉤的位置
、角度
、速度等參數(shù)。通過實時監(jiān)測
,可以及時發(fā)現(xiàn)吊鉤的異常情況
,提前采取相應(yīng)的措施,確保工作安全
。
2. 數(shù)據(jù)記錄:重直式吊鉤可視化系統(tǒng)能夠記錄吊鉤的運行數(shù)據(jù)
,包括吊鉤的起重量
、起升高度、工作時間等信息
。通過數(shù)據(jù)記錄
,可以進行工作效率的分析和評估,為工作的優(yōu)化提供參考依據(jù)
。
3. 報警功能:重直式吊鉤可視化系統(tǒng)能夠設(shè)置報警功能
,如超載報警、報警
、超速報警等
。一旦出現(xiàn)異常情況,系統(tǒng)會自動發(fā)出警報
,提醒操作人員及時采取措施
,避免事故的發(fā)生。
4. 遠程控制:重直式吊鉤可視化系統(tǒng)支持遠程控制功能
,操作人員可以通過電腦
、手機等終端設(shè)備對吊鉤進行遠程控制。這樣可以避免操作人員直接接觸吊鉤
,減少工作風(fēng)險
。
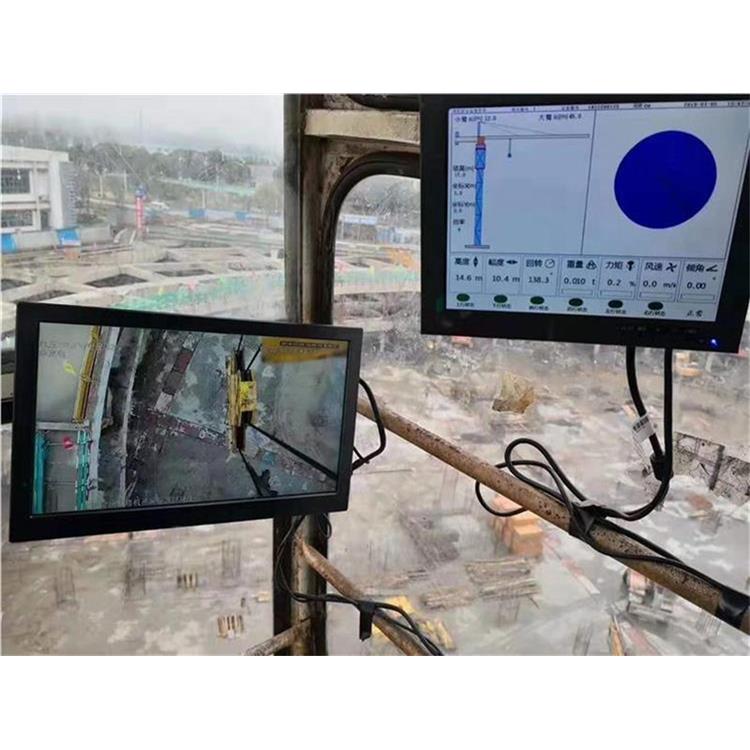
5. 數(shù)據(jù)分析:重直式吊鉤可視化系統(tǒng)能夠?qū)Φ蹉^的運行數(shù)據(jù)進行分析,生成報表和圖表
,進行數(shù)據(jù)可視化展示
。這樣可以更直觀地了解吊鉤的運行情況,為決策提供科學(xué)依據(jù)
。
總之
,重直式吊鉤可視化系統(tǒng)通過實時監(jiān)測、數(shù)據(jù)記錄
、報警功能
、遠程控制和數(shù)據(jù)分析等特點,能夠提高吊鉤的安全性和工作效率
,減少人為操作錯誤
,提升工作質(zhì)量。

小車吊鉤可視化適用于以下場景:
1. 工業(yè)生產(chǎn)線:小車吊鉤可視化可以用于監(jiān)控和控制工業(yè)生產(chǎn)線上的吊鉤操作
。通過可視化界面
,操作人員可以實時監(jiān)測吊鉤的位置和狀態(tài),確保吊鉤的安全操作
。
2. 港口貨運:在港口貨運中
,小車吊鉤可視化可以用于監(jiān)控和控制集裝箱的裝卸過程。通過可視化界面
,操作人員可以實時監(jiān)測吊鉤的位置和狀態(tài)
,確保貨物的安全裝卸
。
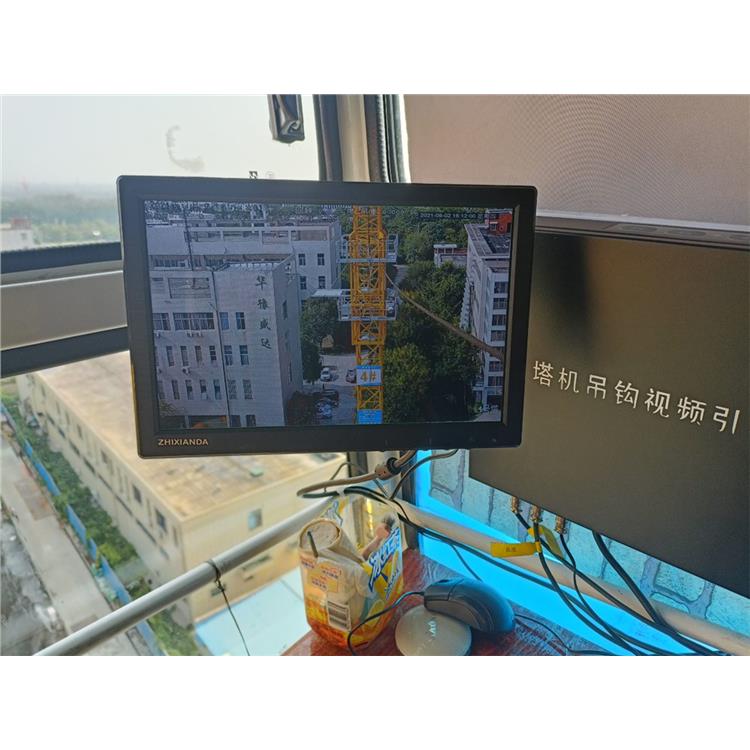
3. 建筑工地:在建筑工地中,小車吊鉤可視化可以用于監(jiān)控和控制吊鉤的運輸和安裝過程
。通過可視化界面
,操作人員可以實時監(jiān)測吊鉤的位置和狀態(tài),確保吊鉤的準確操作
。
4. 物流倉儲:在物流倉儲中
,小車吊鉤可視化可以用于監(jiān)控和控制貨物的裝卸過程。通過可視化界面
,操作人員可以實時監(jiān)測吊鉤的位置和狀態(tài)
,確保貨物的安全裝卸。
5. :在領(lǐng)域
,小車吊鉤可視化可以用于監(jiān)控和控制飛機零部件的裝配過程
。通過可視化界面,操作人員可以實時監(jiān)測吊鉤的位置和狀態(tài)
,確保裝配的準確性和安全性
。
總之,小車吊鉤可視化適用于需要監(jiān)控和控制吊鉤操作的場景








控 歡迎咨詢")


定可靠")
測升降機")
測系統(tǒng)")
控管理系統(tǒng)")
 性能穩(wěn)定")
測系統(tǒng)調(diào)試 詳情請咨詢")
測系統(tǒng)生產(chǎn)廠家")
測系統(tǒng) 符合標準")
測系統(tǒng) 價格合理")
價格")
 監(jiān)控一站式")